

Структурный и кинематический анализ механизмов
.pdfВеличина кориолисова ускорения равна
aBк3B = 2VB3B ω3, м/ с2 , |
(10) |
где относительной скорости VB3B на плане скоростей соответствует отрезок bb3, взятый в масштабе μV : VB3B =bb3 μV , м/ с.
Чтобы определить направление кориолисова ускорения, необходимо повернуть на 90° вектор относительной скорости VB3B в сторону вращения кулисы. В нашем примере кулиса вращается по часовой стрелке. Определение направления aB3B показано на рис.11.
Тангенциальное ускорение aBt 3B перпендикулярно кориолисовому ускорению atB3B aBк3B , т.е. направлено по кулисе.
На плане ускорений из точки b проводим вектор кориолисова ускорения
к |
|
|
|
к |
|
aBк3B |
|
|
|
aB3B длиной, равной отрезку bb3 |
= |
|
, |
мм. Через конец кориолисова |
|||||
μa |
|||||||||
|
|
|
|
|
|
|
|
||
ускорения |
b |
к |
проводим |
перпендикулярное |
направление тангенциального |
||||
|
3 |
|
|
|
|
|
|
||
ускорения aBt |
3B . |
|
|
|
|
|
|
||
Таким образом, уравнение (8) графически изображено. Строим на плане |
|||||||||
ускорений |
уравнение (9). |
Ускорение |
aC = 0, |
следовательно, от полюса π2 |
|||||
21

откладываем |
отрезок |
π |
|
b |
n |
= |
aBn |
3C |
, |
мм, |
пропорциональный |
вектору |
||||||
2 |
3 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
μa |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
нормального ускорения |
a n |
|
. Через конец этого вектора (точку bn ) проводим к |
|||||||||||||||
|
|
|
|
B3C |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
нему перпендикуляр, т.е. |
направление |
тангенциального ускоренияaBt |
3C . |
В |
||||||||||||||
точке встречи сходятся три вектора. Из точки |
b |
к приходит вектор |
at |
|
, |
из |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
B3B |
|
|
|
точки bn |
- at |
|
и из полюса плана ускорений π |
приходит вектор ускорения |
||||||||||||||
3 |
B3C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ab3 .Точка пересечения обозначена b3 .
Ускорение a Д точки Д находим построением. Для этого вектор ускорения aB3 ,
точки B |
3 |
нужно удлинить в пропорции |
|
СД |
;πd =πb |
СД |
, |
мм. |
|
|
|
|
|||||||
|
|
|
СВ3 |
3 СВ3 |
|
||||
Для определения ускорения точки Е воспользуемся уравнением |
|||||||||
|
|
aE = a Д + aЕДn |
+ aЕДt . |
|
|
|
(11) |
||
Вторым условием является то, что ускорение aE известно по направлению: оно направлено параллельно оси направляющих ползуна 5, т.е. aE Æ
горизонтально.
Величина нормального относительного ускорения равна
aЕДn = |
V 2 |
ЕД , м/ с2 . Относительная скорость VЕД берется из плана скоростей |
I ЕД
(рис. 10а).
VЕД = d (ed)μV , м/ с.
Вектор ускорения aЕДn направлен по звену 4 в направлении оси Е к Д, т.е. aЕДn Æ||ЕД, а его длина на плане ускорений
a n
den = ЕД , мм.
μa
Тангенциальное относительное ускорение известно только по направлению. Вектор aЕДt направлен перпендикулярно вектору aЕДt т.е.
22
aЕДt → aЕДn . На плане ускорений направление вектора aЕДt проводим из конца вектора aЕДn . Величина ускорения aЕДt определяется точкой встречи его с направлением ускорения aE , проведенным из полюса π2 . Соответствующие вектора обозначены точками ed t и π2 e.
Определяем угловые ускорения звеньев. Угловое ускорение ε1 ведущего звена АВ, совершающего равномерное движение, равно нулю.
Угловые ускорения кулисы 3 и шатуна 4 определяются по формулам
|
|
at |
|
|
||
ε3 = |
|
B3C |
, |
рад/ с, |
(12) |
|
|
|
|
||||
|
AB3C |
|
|
|||
|
|
aЕДt |
рад/ с. |
(13) |
||
ε4 = |
|
|
, |
|||
|
||||||
|
|
AЕД |
|
|
||
Тангенциальные ускорения aBt 3 и aЕДt вычисляются из плана ускорений:
|
at |
= (bnb )μ |
a |
, |
м/ с2 , |
|
B3 |
3 3 |
|
|
|
|
aЕДt |
= (en e)μa , |
м/ с2 . |
||
Перенос вектора aBt |
3 в B3 на плане механизма указывает направление углового |
||||
ускорения ε3 по часовой стрелке, а перенос вектора aЕДt в точку Е указывает направление ε4 против часовой стрелки.
Пример 2. Механизм строгального станка с диадой V модификации частного вида (рис. 6)
Планы скоростей и ускорений строятся аналогично предыдущему
механизму за исключением точки Е. Скорость точки Е: |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
(14) |
VE =VД +VEД , VE →горизонтально. |
|||||||||||
Отличие состоит в том, что вектор относительной скорости направлен |
|||||||||||
|
|
ЕД →вертикально. |
|||||||||
вертикально, по направлению движения ползуна 4, т.е. V |
|||||||||||
Ускорение точки Е |
|
||||||||||
aE = a Д + aЕДn + aЕДt , aE →горизонтально. |
(15) |
||||||||||
23

Звено 5 с точкой Е на нем движется возвратно-поступательно и aЕДn = 0 .
Относительное ускорение aЕДt направлено вертикально. |
На |
рисунке |
13 |
приведен совмещенный план скоростей, на рисунке 14 - план ускорений.
м/с*мм
μ

Рис.13
24

μа =--м/с *мм
*мм
π







Рис.14
Пример 3. Механизм долбежного станка с вращающейся кулисой
(рис. 7).
Векторные уравнения для характерных точек механизма имеют вид:
План скоростей План ускорений
1. VB =ω1 A AB ; |
1. aB =ω12 ABA ; |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
VB → BA . |
aB = aBn →|| BA. |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
2. VB3 =VB +VB3B ; |
|
|
k |
t |
; |
||||||||
|
|
|
|
|
|
|
|
|
2. aB3 = aB + aB3 |
+ aB3B |
|||
VB3 → B3C . |
aB3 = aBn3 + aBt 3 ; |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
aBk3B = 2VB3B ω3 ; |
|
|||
|
|
|
|
|
|
|
|
|
k |
900 |
ωH3 |
|
|
|
|
|
|
|
|
|
|
|
aB3B →V B3B ; |
|
|||
|
|
|
|
|
|
|
|
|
aBt 3B → aBn3B ; |
aBn3 →|| B3C ; |
|||
|
|
|
|
|
|
|
|
|
aBn 3 = |
V 3 |
; aBt 3 → aBn3 . |
||
|
|
|
|
|
|
|
|
|
B3 |
||||
|
|
|
|
|
|
|
|
|
AB3C |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25

3. VД - построением 3. a Д - построением
Вектор скорости и вектор ускорения точки Д направлен в
противоположную сторону по отношению соответственно вектору скорости и
вектору |
ускорения точки |
|
|
|
|
Д на плане |
|
|
|||||||||||||
B3 . Длина вектора V |
скоростей |
||||||||||||||||||||
|
pd = pb |
СД |
|
, мм. Длина вектора a |
|
на плане ускорений πd =πb |
СД |
, мм, |
|||||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
|
3 СВ3 |
|
Д |
|
|
|
|
|
3 СВ3 |
||||||||
где СВ3 |
и СД - длины участков кулисы от стойки С до точек В3 и Д, взятых с |
||||||||||||||||||||
плана механизма в мм. |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
4. aE = a Д + aЕДn + aЕДt |
|
|
|||||||||
4. VЕ =VД +VЕД |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
VE →вертикально |
aE →вертикально |
|
|
||||||||||||||||||
|
|
ЕД → ЕД |
|
|
|
|
|
|
|
|
|
|
|||||||||
V |
|
|
|
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
aЕДn |
= |
VЕД |
; |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AЕД |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
aЕДn |
→|| ЕД ; |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
aЕДt |
→ aЕДn . |
|
|
||||||
Угловые скорости и ускорения звеньев вычисляются по формулам:
H |
= |
|
VB3 |
; |
H |
= |
aBt |
3 |
|
|
; |
|
ω3 |
|
|
|
ε3 |
|
|
|
|
||||
AB3C |
AB3C |
|
||||||||||
|
|
|
|
|
|
|
||||||
H |
= |
VЕД |
; |
H |
= |
aЕДt |
. |
|||||
ω4 |
|
|
ε4 |
|
|
|
||||||
|
AЕД |
AЕД |
||||||||||
|
|
|
|
|
|
|
|
|
||||
На рис. 15 приведен совмещенный план скоростей. На рис. 16 построен
план ускорений для второго положения механизма.
26

μ |
Рис. 15 |
27 |
μ










τ
τ
Рис. 16
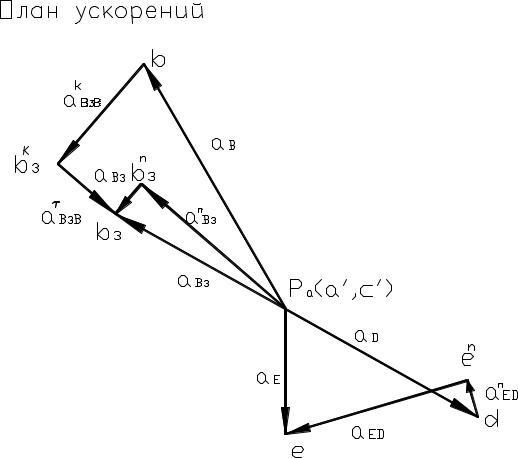
Пример 4. Механизм строгального станка с вращающейся кулисой (рис. 8). Составляем векторные уравнения для характерных точек механизма
План скоростей План ускорений
1. V |
|
|
=ω |
A |
|
|
|
|
|
|
|
|
→ AB . |
|
|
|
|
=ω2 |
|
|
→ |
|||||
B |
AB |
, V |
B |
1. aB |
AAB , |
|||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
1 |
aB |
||BA. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2. aB3 = aB + aBк3B + aBt 3B . |
||||||||||||||
2. VB3 =VB +VB3B . |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
VB3 → B3C, |
|
VB3B →||B3C . |
aB3 = aBn3 + aBt 3 , |
aBк3B = 2VB3Bω3 . |
||||||||||||||||||||||
ω3 =VB3 / AB3C . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
Вектор |
a K |
|
|
|
направлен по |
|
|
|
, если последний повернуть на 90° в |
|||||||||||
|
|
|
|
|
|
|
|
|
V |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
B3B |
|
|
B3B |
|
|
|
|
|
|
|||||||
сторону ω3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
aBt 3B → aBк3B , |
|
|
|
|
|
|
|
|
|
n |
|
VB23 |
|
n |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aB3 = |
|
+ a |
|
→||B3C . |
||||
|
t |
|
|
|
n |
|
|
|
|
|
|
|
|
|
AB3C |
|
||||||||||
aB3 → aB3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
28
|
|
Д →построением. |
3. |
a Д →построением. |
|
|
3. V |
|
|||||
|
|
Согласно теореме подобия треугольник на плане скоростей, |
||||
образованный концами векторов скоростей |
точек B3 , C и |
Д, должен быть |
||||
подобен треугольнику, образованному этими точками на плане механизмов. |
||||||
|
|
Аналогично на плане ускорений треугольник, образованный концами |
||||
векторов полных ускорений |
точек |
B3 , C |
и Д, должен |
быть подобен |
||
треугольнику, образованному этими точками на плане механизмов.
При построении подобных треугольников на планах скоростей и ускорений нужно соблюдать правило обхода. На плане механизмов обход треугольника B3CД проходит против движения часовой стрелки,
следовательно, на планах скоростей и ускорений обход соответствующих точек треугольников также должен быть против движения часовой стрелки.
|
|
|
|
|
|
|
|
|
4. aE = a Д + aЕДn + aЕДt , |
||
4. VE =V Д +VЕД , |
|||||||||||
|
|
|
aE - горизонтально. |
||||||||
VE →горизонтально, |
|||||||||||
|
|
ЕД → ЕД . |
|
|
|
||||||
V |
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
aЕДn = |
VЕД |
; aЕДn →||ЕД; aЕДt → a |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
AЕД |
|
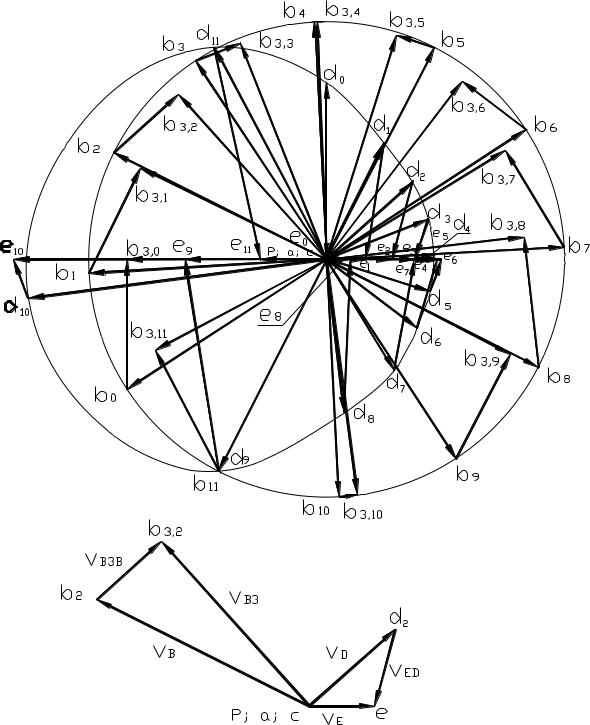
План ускорений для 2-го положения механизма показан на рис. 17. На рис. 18а изображен план скоростей для 2-го положения механизма, на рис. 18б - совмещенный план скоростей.
Угловые скорости и ускорения звеньев вычисляем по формулам:
H |
= |
|
VB3 |
; |
H |
= |
aBt |
3 |
|
|
; |
|
ω3 |
|
|
|
ε3 |
|
|
|
|
||||
AB3С |
AB3C |
|
||||||||||
|
|
|
|
|
|
|
||||||
H |
= |
VЕД |
; |
H |
= |
aЕДt |
. |
|||||
ω4 |
|
|
ε4 |
|
|
|
||||||
|
AЕД |
AЕД |
||||||||||
|
|
|
|
|
|
|
|
|
||||
29














 μ
μ









Рис.17
30