

3.3 Порядок расчета рычажно-зубчатой передачи и шкалы прибора
Исходными данными должны быть:
– диапазон измеряемых давлений
![]() ;
;
– максимальный угол поворота стрелки
![]() ;
;
– относительная погрешность измерения
![]() ;
;
– интервал шкалы a, мм;
– тип элементарного рычажного механизма (синусный, тангенсный, кривошипно-ползунный);
– передаточное число зубчатой пары
![]() ;
;
– начальный центральный угол трубки
![]() .
.
В результате расчетов определяют: длину
стрелки R, радиус
начальной кривизны трубки
![]() ,
длину шатуна l, длину
кривошипа r, максимальный
угол поворота кривошипа
,
длину шатуна l, длину
кривошипа r, максимальный
угол поворота кривошипа
![]() (рисунок
8).
(рисунок
8).
В таблице 7 приведены элементарные рычажные механизмы, применяемые в приборах и датчиках давления для преобразования поступательного движения во вращательное.
Тип элементарного рычажного механизма выбирается исходя из конструктивных соображений или задается в исходных данных на проектирование. Наиболее часто в приборах и датчиках давления используются кривошипно-ползунный механизм.
Рассмотрим порядок расчета прибора давления с кривошипно-ползунный механизм (см. рисунок 8). Согласно рисунку 8 линейное перемещение y конца стрелки (длинной R) по шкале связано с линейным перемещением W свободного конца трубчатой пружины (точка С) зависимостью
|
(19) |
|
где iз – |
передаточное число зубчатого механизма; |
|
iм – |
передаточное число рычажного механизма. |
|
Таблица 7 – Элементарные рычажные механизмы и их характеристики
|
Схема механизма |
Функция преобразования |
Передаточное число
|
1 |
Синусный |
W=r(sin |
|
2 |
Тангенсный |
W=k(tg -tg ) |
|
3 |
Кривошипно-ползунный |
W=r(sin -sin ) |
|



При использовании кривошипно-ползунного механизма уравнение статической характеристики рычажно-зубчатого преобразователя
|
(20) |
|
где i |
передаточное число зубчатой передачи (i =8…14); |
|
r – |
длина кривошипа. |
|
Максимальный угол поворота кривошипа
от среднего положения определяется из
условия
![]() .
.
Для определения оптимального положения рычажного механизма выполняют следующие построения.
Из точки С подвижного конца трубки
проводится линия zz
под углом
![]() ,
полученным из формулы (16).
Из центра О кривизны
трубки восстанавливается перпендикуляр
к линии zz. Точка E,
лежащая на прямой zz,
определяет среднее положение кривошипа
r.
,
полученным из формулы (16).
Из центра О кривизны
трубки восстанавливается перпендикуляр
к линии zz. Точка E,
лежащая на прямой zz,
определяет среднее положение кривошипа
r.
Принимают
СЕ = l, находят
DE = r |
(21) |
|
где А – |
расстояние от оси вращения сектора до центра кривизны трубки; |
|
zш |
число зубцов стрелочной шестерни; |
|
m – |
модуль зубчатой шестерни. |
|
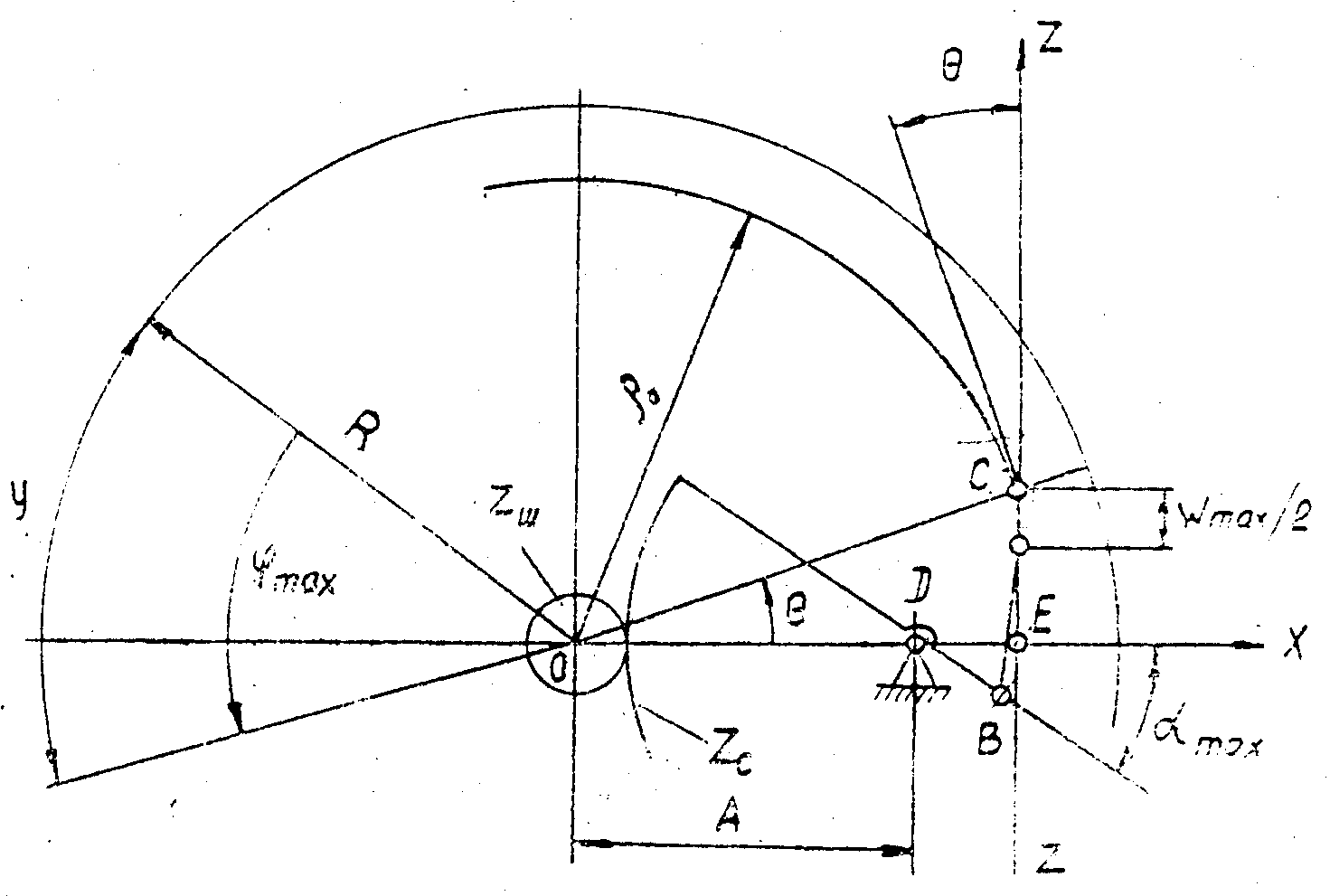
Рисунок 9 – К расчету шкалы и рычажно-зубчатой передачи
Модули зубчатых передач рекомендуется подобрать в соответствии стандарту из таблицы 8, выбирая zш в пределах 17…25.
Таблица 8 - Стандартные модули зубчатых передач
Ряды |
Модули |
|||||||
1 |
0,1 |
0,12 |
0,15 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
2 |
0,11 |
0,14 |
0,18 |
0,22 |
0,33 |
0,43 |
0,55 |
0,7 |
Максимальное перемещение конца трубки (ползуна кривошипа) определяют по формуле
|
(22) |
Максимальный угол поворота кривошипа от среднего положения – по формуле
|
(23) |
Для расчета длины стрелки R необходимо задаться:
– интервалом шкалы b =1,5…4 мм,
– максимальный угол поворота стрелки = 180…330 град;
– величиной относительной погрешности = 0,5…2,5%.
Определяют:
По заданному значению относительной погрешности абсолютное значение погрешности измерения
![]()
По ГОСТ 5365-73 цену деления шкалы выбирают из ряда чисел,
где С=(1,2,5)10![]() (m –
любое целое положительное число или
0),
(m –
любое целое положительное число или
0),
причем С=![]()
– Полное число делений шкалы
![]()
Длину стрелки
R=![]()
Начальный радиус кривизны трубки
![]()
Размеры кривошипа r и шатуна l
![]()
Отношение длин рычагов l/r = (5…7); r = (5…12) мм – из условия работоспособности кривошипного механизма.
Модуль зубчатой передачи m, диаметры делительных окружностей зубчатой пары ( шестерни и зубчатого сектора) и межцентровое расстояние А определяются по формулам:

После выполнения статического расчета вычерчивают в масштабе общий вид механизма прибора.
Расчет спиральной пружины
Усилие, создаваемое спиральной пружиной, устраняет зазоры в шарнирах, опорах и в зубчатом зацеплении. Моментная спиральная пружина обеспечивает кинематическое замыкание механизма и делает положение всех его звеньев кинематически определенным, т.е. в механических приборах спираль часто используют для устранения радиальных зазоров в соединениях передаточного механизма. Наличие радиальных зазоров в соединениях создает погрешность в показаниях прибора, особенно при работе прибора в условиях вибраций.
В электроизмерительных приборах спираль предназначена для создания противодействующего момента и подвода тока к подвижной системе. Cпиральные пружины представляют собой металлическую плоскую ленту, закрученную в виде архимедовой спирали. Внутренний конец пружины к оси подвижной части прибора и наружний – к неподвижной детали прибора, например, к корпусу прибора или к штифту при помощи пайки. При повороте оси в соответствующем направлении пружина закручивается, радиус кривизны витков уменьшается и в материале пружины возникают напряжения изгиба, которые создают противодействующий момент, пропорциональный углу закручивания. При этом витки волоска (спирали) должны лежать в одной плоскости и при работе не соприкасаться друг с другом.
Расчет моментной спиральной пружины
проводят из условия, что ее минимальный
момент
![]() больше всех моментов и сил трения,
приведенных к оси пружины и меньше
момента движущих сил, т.е. момента
приводящего механизм в движение.
больше всех моментов и сил трения,
приведенных к оси пружины и меньше
момента движущих сил, т.е. момента
приводящего механизм в движение.
|
(23) |
|
где n – |
коэффициент запаса; |
|
Mпр – |
момент сил трения, приведенный к оси моментной пружины. |
|
При расчете обычно считают только моменты трения в опорах механизма, в соединениях плеч рычагов и поводков моменты трения могут не рассчитываться, а учитываться коэффициентом запаса n, который рекомендуется выбирать в пределах n=2…3.
Приведенный момент трения от действия спирали будет пропорционален моменту волоска.
|
(24) |
|
где ηс = 0,1…0,3 – |
коэффициент пропорциональности. |
|
Он необходим потому, что величина момента трения непостоянна, изменяется при изменении температур и зависит от качества сборки прибора. При расчете спирали следует учитывать , что увеличение момента , создаваемого спиралью, приводит к увеличению трения в механизме.
Из полученных уравнений находим:
|
(25) |
Приведенный момент трения к оси спиральной пружины оси веса деталей определяют при динамическом расчете прибора по формуле
|
(26) |
|
где
|
диаметр цапф соответственно шестерни и сектора; |
|
Gш, Gс – |
веса шестерни и сектора соответственно; |
|
rш, Rc – |
радиусы начальных окружностей шестерни и сектора соответственно; |
|
μ – |
коэффициент трения в опорах. |
|
Решая совместно уравнения (25) и (26), находим расчетную формулу для минимального момента спирали.
|
(27) |
Максимальный момент, развиваемый спиралью, определяется по формуле:
M |
(28) |
|
где
|
предварительный угол закрутки спирали, выбирают конструктивно; |
|
|
полный угол закрутки спирали; |
|
|
рабочий угол закрутки спирали, равен углу поворота стрелки прибора. |
|
Согласно требованиям нормали на спирали для обеспечения виброустойчивости, отношение b/h = ψ =5…10, определяют толщину спирали по формуле:
|
(29) |
|
где b – |
ширина спирали, который можно принимать конструктивно; |
|
|
допустимое напряжение при изгибе. |
|
 ,
,Для стали У8А принимают = 170 Н/мм
Развернутая длина спирали
|
(30) |
|
где Е – |
модуль упругости материала спирали. |
|
Число витков спирали
|
(31) |
|
где
|
соответственно наружний и внутренние радиусы. |
|
Наружний радиус пружины выбирается конструктивно в пределах 8…12 мм, внутренний радиус пружины равен радиусу оси или колодки крепления – 2…4 мм.
Шаг спирали
|
(32) |