

2.2. Практичні відомості
2.2.1. Експериментальне визначення опору води руху моделі судна. Опір води руху моделі судна вважається відомим, якщо визначається залежність сили опору від швидкості руху моделі судна. Така залежність установлюється в результаті здійснення серії буксирувань моделі, прикріпленої до буксирувального візка. У кожному з буксирувань підтримується однаковий (типовий) ре- жим руху візка вздовж дослідного басейну. При цьому початкова
ділянка руху буксирувального візка називається "розгінною", се- редня – "ділянкою усталеного руху", заключна – "гальмовою". Типова залежність швидкості буксирувального візка від часу t або шляху s(t), пройденого вздовж дослідного басейну, представлена на рис. 2.4.
 Vм(t)
Vм(t)
t0 = 0
s0 = 0
Ta Tm
ta
sa
Vм max
Tb
tb ts t tb ss s
Рис. 2.4. Спрощена типова залежність від часу t і пройденого шляху s(t) швидкості Vм(t) руху моделі судна в дослідному басейні:
Ta = ta – t0 – час прискореного руху;
Tm = tb – ta – час усталеного руху;
Tb = ts – tb – час гальмування
Для визначення залежності сили опору води руху моделі су- дна від її швидкості швидкість руху буксирувального візка "впе- ред" на "ділянці усталеного руху" Vм max у процесі повторення бук-
сирувань моделі східчасто міняється в діапазоні швидкостей від
Vм max = 0 до Vм max = (Vм max)max. При цьому максимальна швидкість (Vм max)max заданої кількості Nr східчастої зміни швидкості Vм max, пов'язаної із заданою кількістю Nt (l0...20) буксирувань моделі суд- на, визначається масштабом моделі судна, але завжди залишається
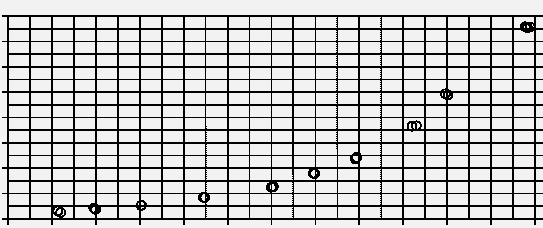
менше від максимальної швидкості буксирувального візка Vt cmax, обумовленої обмеженнями за масою моделі. Одна із залежностей дослідження ходовості судна отримана в результаті проведення серії буксирувань моделі масою представлена на рис. 2.5.
Зворотні переміщення буксирувального візка "назад" у вихідне положення на початку дослідного басейну виконуються в такій же послідовності, як і переміщення "вперед", однак завжди здійснюють- ся з постійною на "ділянці усталеного руху" швидкістю Vм max =
= Vtcм min.
Перед кожним буксируванням моделі "вперед" або "назад"
у процесі руху буксирувального візка робляться тимчасові перер- ви тривалістю l...3 хв для природного заспокоєння обуреного руху рідини.
8
7
6
5
4
3
2 l
0
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
l,0
l,l
l,2
l,3
l,4
Швидкість Vм, м/с
Рис. 2.5. Залежність поздовжньої сили – сили опору води руху моделі портового буксира Rxм від швидкості Vм руху моделі