

5. Динамическая жесткость привода.
Если полученная выше передаточная функция привода характеризует динамические свойства привода, как элемента системы управления полетом самолета, то динамическая жесткость характеризует жесткость привода, как элемента планера самолета. Указанная жесткость зависит от частоты изменения внешней силы и во многом определяет безопасность от флаттера. Дело в том, если в рулевой поверхности одновременно существуют изгибные и крутильные колебания, то при определенной скорости полета самолета подводимая из воздушного потока энергия, определяемая скоростью полета, может вызвать изгибные колебания с нарастающей амплитудой, которые приводят к разрушению конструкции. Энергия, определяемая скоростью полета самолета и подводимая из вне, пропорциональна квадрату скорости полета самолета, а рассеяние энергии в системе «рулевая поверхность – рулевой привод» пропорционально частоте колебаний рулевой поверхности. Указанные колебания происходят с собственной частотой упругой системы «рулевая поверхность – рулевой привод». Собственная частота этой системы определяется следующим общим соотношением:

Поэтому увеличение жесткости системы рулевого привода способствует увеличению рассеяния энергии, т.е. увеличению безопасности от флаттера.
Схема рулевого привода, подключенного к рулевой поверхности самолета показана на рис.1.23.
Под динамической жесткостью привода понимается передаточная функция привод, определяющая отношение внешней силы Fнв(s) к перемещению штока гидроцилиндра, вызванного этой силой Хп (s). Указанная передаточная функция может быть получена из приведенных выше линеаризованных уравнений динамики привода при mн=0, hн=0, Uвх=0, Fнв=Fo*sint. В предположении, что ЭГУ является безинерционным элементом, передаточная функция динамической жесткости имеет следующий вид:
 .
.
Здесь
 – статическая жесткость следящего
привода.
– статическая жесткость следящего
привода.
Статическая жесткость привода и постоянная времени гидроцилиндра (Тгц) через его параметры определяется следующим образом:
Крu – коэффициент усиления прямой цепи привода по перепаду давления в гидроцилиндре: Kpu (Р1-Р2)max/Ue.max. Можно показать, что с увеличением частоты изменения внешней силы динамическая жесткость привода стремится к жесткости гидроцилиндра:
На рис.1.24 представлены частотные характеристики динамической жесткости рулевого привода, полученные по приведенному выше выражению. Эти характеристики получены при двух наборах параметров привода. Следует отметить, что при сравнительно низкой добротности привода (KD<1/Тгц) фазочастотная характеристика привода положительна, т.е. привод обладает демпфирующими свойствами. При относительно высокой добротности привода (KD > 1/Тгц) фазочастотная характеристика привода - отрицательна и, следовательно, привод не обладает демпфирующими свойствами.
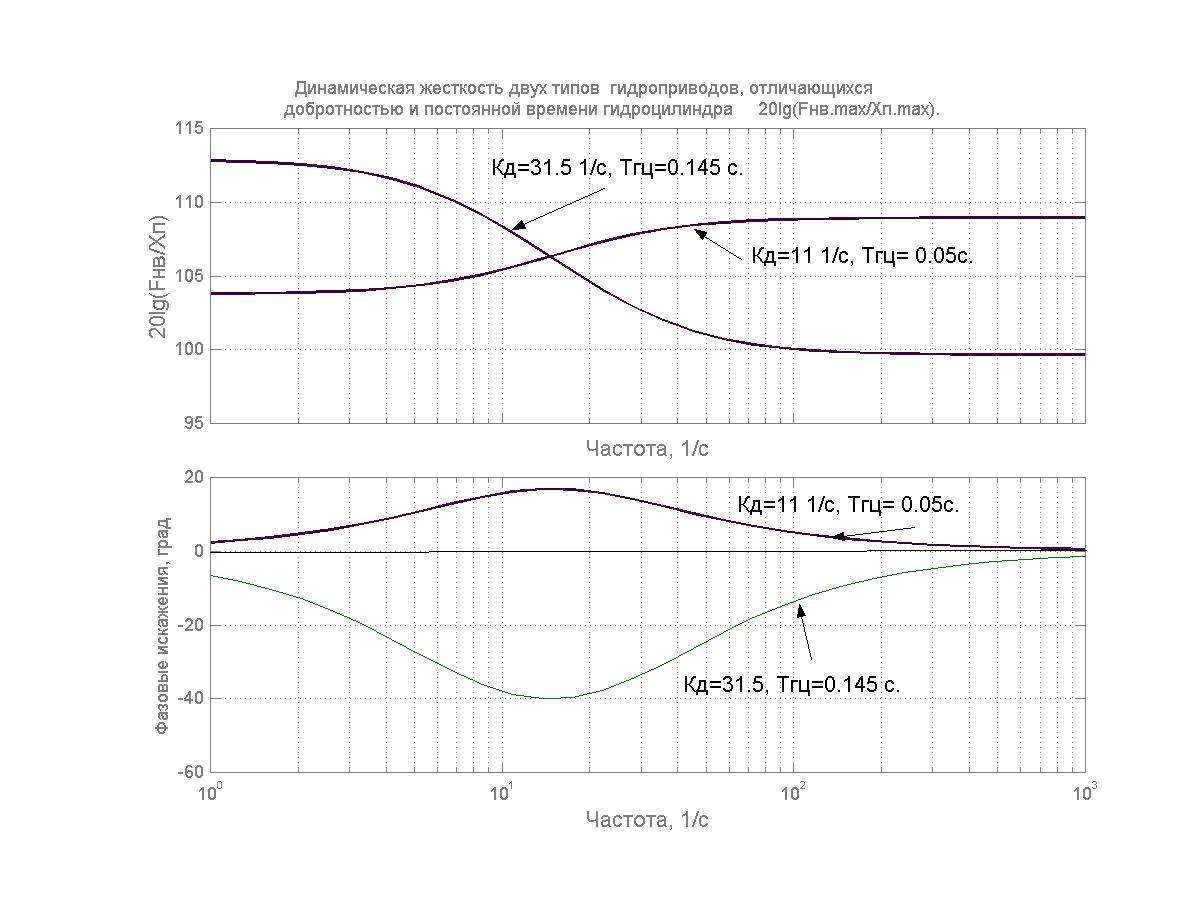
Рис.1.24
Представляет практический интерес оценка динамической жесткости привода, находящегося в отключенном состоянии. При отключении давления подачи привода и включении канала межполостных перетечек в гидроцилиндре с линеаризованной проводимостью Gл. Расчетная схема привода для оценки динамической жесткости привода, который находится в отключенном состоянии показана на рис.1.25.
Р ис.1.25
ис.1.25
Схема привода рулевой поверхности самолета при отказе гидравлического питания
Передаточная функция динамичесой жесткости привода в отключенном состоянии имеет следующий вид:
Очевидно,
что в этом случае привод в области низких
частот динамическая жесткость описывается
дифференцирующим звеном с коэффициентом
(
![]() ), т.е. представляет собой идеальный
демпфер. Начиная с частоты
), т.е. представляет собой идеальный
демпфер. Начиная с частоты
![]() ,
динамическая жесткость привода стремится
к жесткости гидроцилиндра Сгц.
,
динамическая жесткость привода стремится
к жесткости гидроцилиндра Сгц.
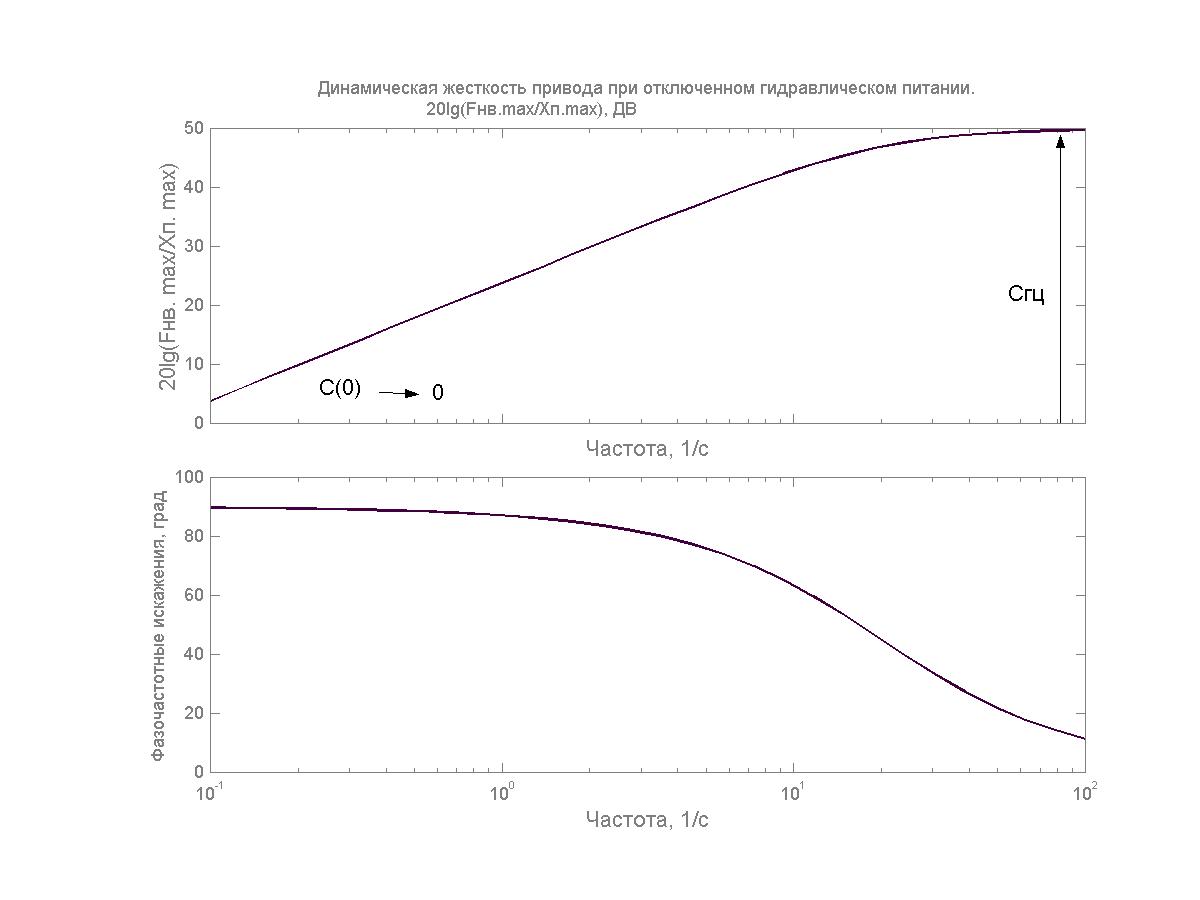
Рис.1.26.
Динамическая жесткость рулевого привода при отказе гидравлического питания и включённом канале кольцевания полостей гидроцилиндра.