

Дальностно-угловые портреты (дул)
Рассматриваемые ДУП и, в частности, дальностно-азимутальные портреты (ДАП) рассчитаны, как и ДУП, на высокое разрешение по дальности и частоте за счет широкополосности и протяженности когерентного сигнала. Частоты следования импульсов рассчитываются, однако, на воспроизведение "планерных", а не более высоких модуляционных доплеровских частот.

Рис. 1.18. Дальностно-азимутальный портрет самолета: а – в координатах – радиальная дальность и амплитуда; б – сечение рис 1.18,а горизонтальной плоскостью
Используются эффекты прямого или обратного синтеза апертуры, необходимость проведение так называемой апертурной коррекции (разд. 3.3-3.6) [40, 41, 115]. Последняя учитывает изменения расстояния до цели в процессе поступательного движения. Иначе говорят о необходимости фокусировки больших прямолинейных синтезированных апертур, подобной возможной фокусировки несиитезированных. Движение цели может быть сведено при этом к повороту цели вокруг собственной оси (разд. 3.5) "Планерная" составляющая спектра (рис. 1.9) при этом сужается. Ширина ее, однако, остается конечной. Последняя определяется разбросом доплеровских частот при вращении цели, который зависит от ее габарита, скорости вращения и длины волны. ДЧП переходит при этом в ДУП с той особенностью, что анализ спектра в узкой области частот его "планерной" составляющей требует значительно большего времени наблюдения, чем анализ спектра в области "турбинных" его составляющих.
На рис. 1.18,а приведен ДУП крупноразмерной цели, а на рис. 1.18,б – более удобное его изображение в виде сечения горизонтальной плоскостью, не выявляющее, однако, распределения эффективных площадей (рис. 1.18,а). Построенный по результатам моделирования ДУП (рис. 1.18) согласуется с экспериментальными портретами работ [40, 41] с учетом различий в полосе частот и дальностей до цели. Некоторые возможности повышения дальности получения ДУП обсуждаются в разд. 3.6.
1.5.2. Признаки при многочастотном зондировании
Эти признаки различаются в зависимости от степени когерентности и протяженности сигнала.
Признаки при когерентном зондировании сигналами малой протяженности
Вследствие провалов в частотном спектре многочастотного сигнала его тело рассогласования является обычно многопиковым, напоминающим тело рассогласования пачки когерентных радиоимпульсов [43]. При постоянной величине F интервала между частотами, не превышающей величины обратной длительности наиболее протяженного дальностного портрета, соответствующего зондированию сигналом со сплошным спектром, рассмотренные ранее дальностные портреты могут воспроизводиться без существенных искажений. Однако с периодичностью 1/F могут появляться дубликаты портрета, связанные с провалами в спектре зондирующего сигнала (штриховые линии на рис. 1.19, полученном путем математического моделирования). Число дубликатов растет с увеличением скважности спектра. Чтобы увеличить расстояние между портретом и дубликатами, приходится расширять набор частот. Наоборот, когда дискретный спектр переходит в сплошной (как это обычно имеет место в случае частотно-манипулированных сигналов с линейной или нелинейной расстановкой частот), необходимое число частотных составляющих сокращается. Оно сокращается также; если не обязательно точно воспроизводить портрет, а достаточно лишь различать цели больших или малых размеров.
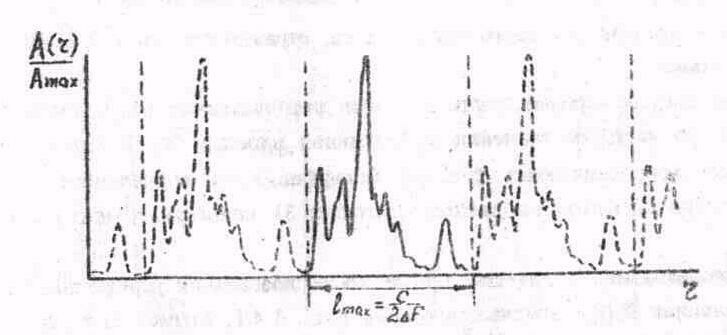
Рис. 1.19. Дальностный портрет самолета, полученный при использовании когерентного многочастотного сигнала с параметрами: разнос частот - 2,5 МГц, число отсчетов спектра – 32, общая ширина спектра -80 МГц, Пунктирам показаны дубликаты портретов