

1.3. Траекторные признаки
Учитывают закономерности движения одиночных я групповых целей различных классов, его характеристики и особенности [2, 27-29]. Так, к характеристикам баллистических целей относят координаты предполагаемых точек падения и старта, полученные в результате прямого и обратного прогноза, абсолютные величины ускорений (замедлений) при входе в плотные слои атмосферы. При классификации аэродинамических объектов (самолетов, вертолетов, ракет, аэростатов и т.д.) учитывают их полные скорости V, высоты Н и первые производные от этих параметров. Характеристики строя групповых целей, их число, интервалы по фронту и в глубину также могут служить признаками распознавания.
На рис. 1.1 приведены области возможных значений высот Н и скоростей v воздушных целей различных классов. Признаки Н и V желательно использовать совместно из-за наличия определенной корреляции между ними.
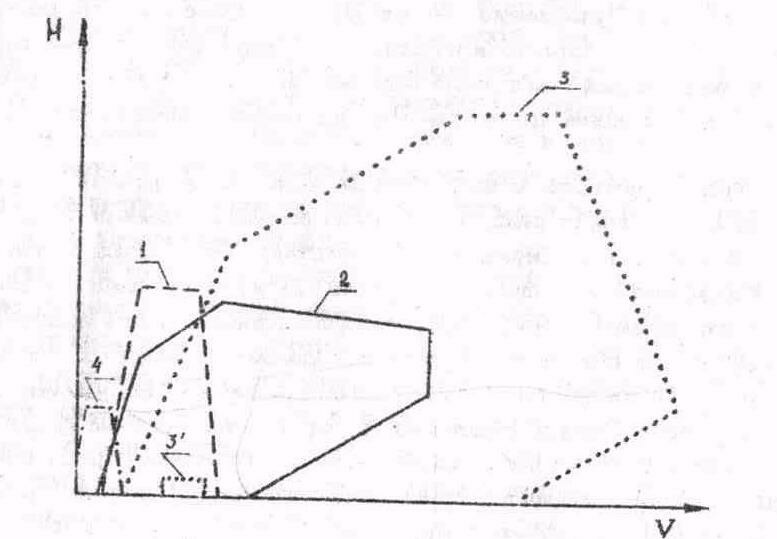
Рис. 1.1. Траекториям признаки: I. самолеты больших размеров: 2 - самолеты средних размеров: 3 - ракеты (3 - крылатые ракеты типа АЛКМ); 4 – вертолеты
Как видно из рис. 1.1, признаки различных классов целей перекрываются, что требует привлечения наряду с ними сигнальных признаков. В то же время для эффективного использования располагаемой траекторией информации точность измерения траекторных параметров должна быть достаточно высокой.
1.4. Сигнальные признаки однопозиционной активной локации при узкополосном зондировании
В качестве признаков распознавания целей при их узкополосном зондировании можно использовать: 1) эффективные площади (ЭП) целей; 2) поляризационные признаки; 3) модуляционные признаки.
1.4.1. Эффективные площади (эп) целей
Средние
ЭП
![]() для однопозиционной локации ряда целей
приведены в табл. 1.1.
для однопозиционной локации ряда целей
приведены в табл. 1.1.
Таблица 1.1
Примерные эффективные площади радиолокационных целей
№№ п/п |
Радиолокационная цель |
[м2] |
[дБ] |
1 |
Корабль водоизмещения 104 т |
3*104…104 |
45…40 |
2 |
Средний корабль водоизмещением 3*103...103 т |
104…3*103 |
40...35 |
3 |
Малые корабли водоизмещением 200...60 т |
250...50 |
25...17 |
4 |
Подводные лодки в надводном положении |
140...30 |
20... 15 |
5 |
Транспортный самолет, дальний бомбардировщик |
100...20 |
20...13 |
6 |
Средний бомбардировщик |
30…5 |
15…7 |
7 |
Бронетранспортер |
30...8 |
15...9 |
8 |
Тягач тяжелый |
20... 10 |
15...10 |
9 |
Тяжелый истребитель |
10...5 |
10...7 |
10 |
Танк |
10...6 |
10...8 |
11 |
Автомашина |
8...6 |
9...8 |
12 |
Легкий истребитель |
5...1 |
7...0 |
13 |
Человек (λ=3 см) |
1.2...0,5 |
1...-3 |
14 |
Рубка подводной лодки |
1 |
0 |
15 |
Крылатая ракета |
1...10-2 |
0…-20 |
16 |
Стая птиц, попавших в разрешаемый объем РЛС |
1...10-2 |
0…-20 |
17 |
Головка баллистической ракеты |
1...10-3 |
0…-30 |
18 |
Голубь(λ=3 см) |
10-2…10-3 |
-20…-30 |
19 |
Пчела рабочая |
6*10-3…10-8 |
-23…-80 |
В ней же приведены те же значения, выраженные в децибелах по отношению к ЭП, равной 1 м2:
[дБ] = 10 lg ( [м2]). (1.1)
Значения ЭП в децибелах могут быть оценены из уравнения дальности радиолокация по формуле
[дБ] = 10 lg (q2) + 40 lg (rц [м]) – 10 lg (U[м2]) + Δ, (1.2)
где |
q2 |
– |
оценка усредненного энергетического отношения сигнал-шум; |
|
rц [м] |
– |
оценке дальности; |
|
Δ |
– |
поправка на текущие условия; |
|
U[м2] |
– |
потенциал РЛС |
U[м2]=2ЭG(ε,β){А(ε,β)[м2]}/(4π)2N0 (1.3)
где |
Э |
– |
энергия зондирующего сигнала (с учетом потерь в среде и системе обработки); |
|
||
|
N0 |
– |
спектральная плотность мощности шума; |
|
||
|
G(ε,β) и {А(ε,β)[м2]} |
– |
коэффициент усиления передающей и эффективная площадь приемной антенны (в м2), зависящие от углов отклонения луча относительно нормали к апертуре. |
|||
Переход
к децибельной шкале упрощает расчеты
и позволяет свести ошибку в виде множителя
(мультипликативную) к ошибке в виде
слагаемого (к аддитивной). Заметим
попутно, что децибельное значение
средней ЭП
![]() [дБ]
и среднее от децибельных значений ЭП
[дБ]
и среднее от децибельных значений ЭП
![]() отличаются
между собой.
отличаются
между собой.
Ориентировочные данные табл. 1.1 неполно учитывают эффекты изменения ЭП по диапазонам волы, в том числе эффекты резонансного вторичного излучения и дифракционного огибания цели при последовательном увеличении длины волны. Эти данные свидетельствуют, однако, что усредненная ЭП является важным признаком распознавания.
Ряд факторов затрудняет, тем не менее, использование этого признака, особенно в отсутствие других признаков. К таким факторам относятся:
зависимость усредненных ЭП от выбора сектора телесных или ракурсных углов усреднения;
отличие измеряемых значений ЭП от усредненных при малом времени усреднения;
зависимость результатов измерений ЭП от потенциала РЛС;
возможности противолокационной имитации и маскировки ЭП.
Остановимся на перечисленных факторах подробнее.
Зависимость усредненных ЭП от выбора углового сектора усреднения.
Можно при необходимости учесть различия ЭП в различных сравнительно крупных угловых секторах, предусматривая оценивание номера сектора по траекторным данным,
Отличие измеренных ЭП от усредненных зависит, наряду со временем усреднения, от статистики отраженного сигнала при движении цели и от характера зондирования (постоянства или возможности изменения несущей частоты). Возникающие при этом эффекты поясняются ниже результатами математического моделирования (разд. 1.3) применительно к десятисантиметровому диапазону волн.
На рис. 1.2 приведены примеры распределения плотностей вероятности [м2] и [дБ] для самолетов больших размеров (рис. 1.2,а, б), для самолетов средних размеров (рис. 1.2,в, г) и для крылатых ракет (рис, 1.2,д, е).
На рис. 1.3 приведены примеры участков характеристик обратного вторичного излучения самолета большого размера (ряс. 1.3,а) и крылатой ракеты (рис. 1.3,6). Видно, что для цели меньших размеров лепестки характеристики обратного вторичного излучения шире. Соответственно этому нормированные корреляционные функции флюктуаций амплитуд сигналов, вызываемых изменениями курсового угла в процессе движения цели, имеют для целей различных классов разную ширину (рис. 1.4). Чем цель меньше, тем корреляционная функция шире.
На рис. 1.5 показаны зависимости ЭП от несущей частоты колебаний для самолета большого размера (рис. 1.5, а) и крылатой ракеты (рис. 1.5, б). На рис. 1.6 представлены соответствующие нормированные корреляционные функции флюктуаций амплитуд сигналов, возникающих при изменении частоты. Чем цель меньше, тем шире лепестки зависимости (рис. 1.5) и основной лепесток корреляционной функции (рис. 1.6).
Зависимости (рис. 1.5 - 1.6), сходные с зависимостями (рис. 1.3 - 1.4), показывают, что усреднение по времени (углу Θ) может заменяться усреднением по несущей частоте.
Рис. 1.7 поясняет зависимость от числа усреднений N среднеквадратического отклонения ЭП, нормированного к максимальному значению ЭП при N = 1. Штриховкой показана область распределения этого отношения по результатам моделирования в предположении слабой корреляции между отсчетами вследствие их временного или частотного разнесения. Необходимое число обращений к цели зависит от выбранного алфавита классов, частотного диапазона, степени использования других признаков.
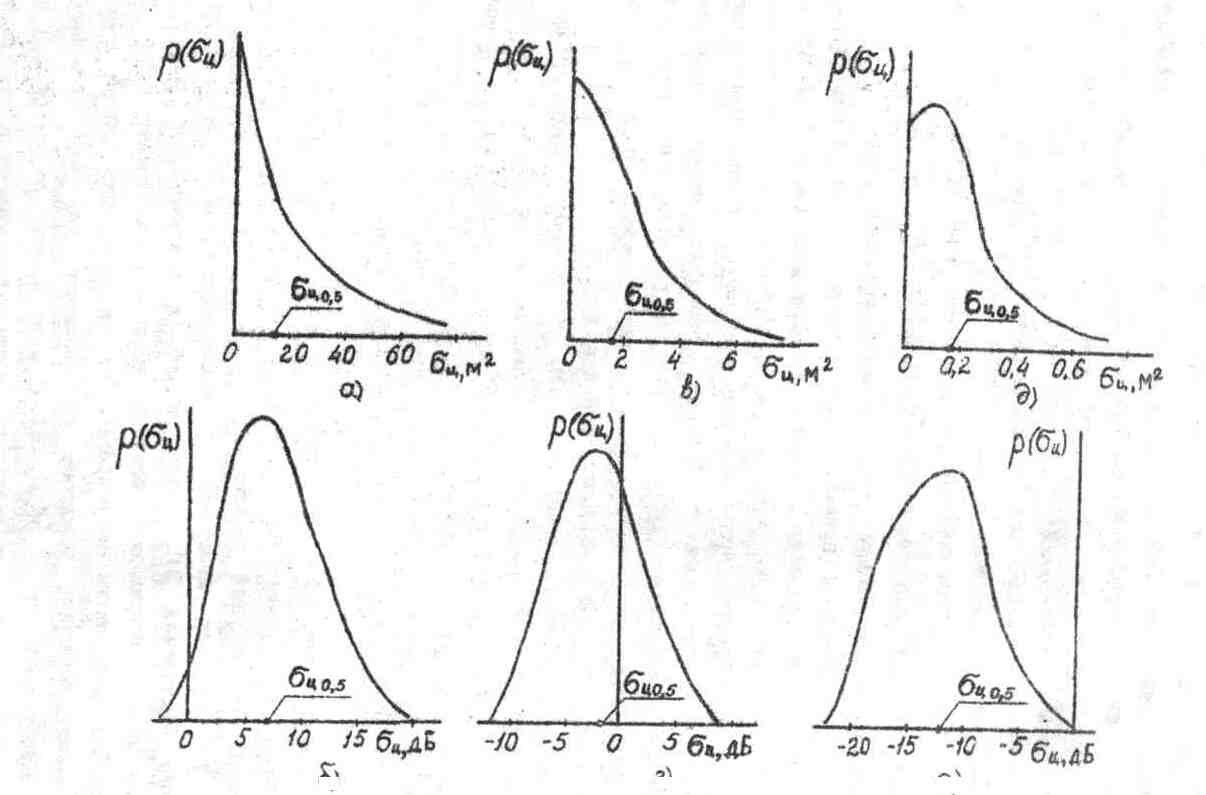
Рис. 1.2. Плотности распределения при узкополосном зондировании: а, 6-самолет больших размеров: в, г - самолет средних размеров; д, е - крылатая ракета; а, в, д - выражена в м2; 6 г, е - выражена в дБ

Рис. 1.3. Участки диаграмм обратного вторичного излучения: а - самолет больших размеров: б – крылатая ракета

Рис. 1.4. Корреляционные функции флюктуаций ЭП целей при изменениях ракурса на δΘ: 1–самолет больших размеров; 2 - самолет средних размеров; 3 -крылатая ракета

Рис. 1.5. Частотные зависимости ЭП целей: а - самолет больших размеров; б – крылатая ракета

Рис. 1.6. Корреляционные функции флюктуаций ЭП целей при изменениях несущей частоты на δf: 1 –самолет больших размеров; 2-самолет средних размеров; 3– крылатая ракета
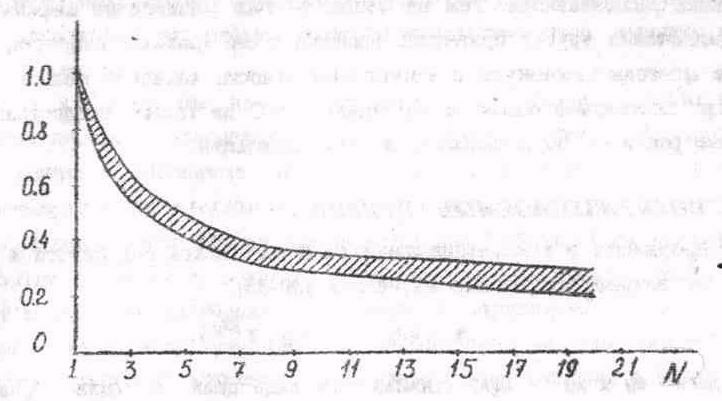
Рис. 1.7. Зависимость нормированного среднеквадратического отклонения оценок ЭП целей от числа усреднений N.
На рис. 1.8 приведены области распределения значений [дБ] для целей больших 1, средних 2 и малых 3 размеров в отсутствие противолокационной маскировки и имитации. Пунктиром показано возможное расширение этих областей за счет зависимости результата измерений от нестабильностей. Последняя зависимость может быть учтена путем введения децибельных поправок на эксплуатационные изменения фактической мощности передатчика, чувствительности приемника, потерь в антенной системе и на текущее состояние среды.

Рис. 1.3. Области существования ЭП целей, выраженной в дБ: 1 - самолеты больших размеров; 2 - самолеты средних размеров, 3 - крылатые ракеты и легкомоторные самолеты
Противолокационная имитация и маскировка. Для целей малых размеров может сводиться к искусственному увеличению ЭП, чтобы отвлечь на них удар, предназначаемый по целям больших или средних размеров [44]. Противолокационная маскировка целей больших и средних размеров сводятся к использованию технологий типа "Стелс", позволяющих доводить их ЭП до ЭП малоразмерных целей, обычно снижающих полную скорость и маневренность [110]. Все это, конечно, снижает возможности использования ЭП как признак распознавания. Тем не менее, за счет расширения алфавита классов и привлечения других признаков распознавания (размер, скорость, использование многопозиционности локации) можно, в принципе, при достаточно большом потенциале РЛС не только предотвращать ошибочные решения, но и выявлять наличие имитации.