

Цифрові методи модуляції
Розглянуті вище методи модуляції дозволяють в принципі абсолютно точно передати значення сигналу (безперервні - в будь-які, імпульсні - в окремі моменти часу). Але практично точність передачі при використанні цих методів обмежена дією перешкод і не ідеальністю характеристик модулятора, лінії зв'язку, демодулятора і інших пристроїв, що беруть участь в передачі сигналу.
Незрівнянно вищу точність забезпечують дискретні, або цифрові, методи модуляції. При цифровій модуляції сигнал піддається квантуванню як за часом, так і по рівню. Збільшуючи число рівнів квантування (і відповідно розрядність коду), можна зробити помилку квантування по рівню дуже малою. Природно, що за це доводиться розплачуватися збільшенням часу передачі або розширенням необхідної смуги пропускання лінії зв'язку (якщо збільшувати частоту проходження імпульсів). Представлення дискретного за часом і по рівню сигналу у вигляді цифрового коду здійснюється за певними правилами відповідно до прийнятого методу кодування. Пристрої, що здійснюють кодування і зворотне перетворення - декодування сигналу, називають відповідно кодером і декодером.
Якщо в кожному такті передається повне значення сигналу, то такий метод називається кодоімпульсної модуляцією (КІМ) .Для зменшення числа передаваних розрядів коду можна передавати лише зміну сигналу за період квантування. Такий метод називається різницевою модуляцією. У граничному випадку можна передавати тільки знак приросту сигналу, для чого потрібен тільки один розряд (наприклад, наявність імпульсу означає позитивна, відсутність - негативна зміна сигналу, що відповідає дельта-модуляції).
Цифрові методи модуляції дозволяють вести передачу інформації без накопичення помилок за рахунок перетворення сигналу в пунктах ретрансляції, що дозволяє створювати системи з практично необмеженою можливістю дії. Крім того, цифрові сигнали не вимагають додаткових перетворень при введенні-виведенні з ЦОМ, що широко використовують в телемеханіці. Все це зумовило виняткове використання цифрових методів для передачі телемеханічної інформації.
Для того, щоб охарактеризувати точність передачі інформації при цифрових методах, використовують коефіцієнт помилок, чисельно рівний відношенню числа неправильно прийнятих символів до загального числа переданих. В більшості випадків, особливо при передачі командної інформації, таке значення коефіцієнта помилок дуже велике. В той же час, згідно теоремі Шеннона, якщо швидкість передачі інформації не перевищує пропускної спроможності каналу, можна передати інформацію в принципі взагалі без помилок.
Підвищення точності передачі можна добитися шляхом введення надмірності в передаване повідомлення. Для цього, окрім інформаційних розрядів, по каналу передаються додаткові розряди, інформації не несучі, що служать тільки для підвищення точності передачі. Ці додаткові розряди, підібрані за певними правилами, дозволяють при прийомі знаходити або навіть виправляти помилки в інформаційних розрядах.
В цілому всі способи підвищення точності передачі можна розділити на дві великі групи: з використанням перешкодостійких кодів і з використанням зворотного зв'язку.
Перешкодостійке кодування. Суть цього методу полягає в кодуванні передаваної інформації за допомогою спеціальних коректуючих кодів.
Розроблене велике число різних коректуючих кодів. Якнайкращими є такі коди, які дозволяють знаходити помилки найбільшої кратності при внесенні якнайменшої надмірності. Крім того, необхідно враховувати простоту побудови кодуючих і декодуючих пристроїв.
Зворотній зв'язок. Іншим способом введення надмірності для підвищення перешкодостійкості є використання зворотного каналу передачі. Існує два основні способи використання зворотного каналу: інформаційний і вирішальний зворотний зв'язок.
Інформаційний зворотній зв'язок (ІЗЗ) полягає у тому, що кожен прийнятий приємо-передаючим пристроєм одержувача інформації блок інформації по зворотному каналу передається назад до джерела інформації. Пристрої порівняння порозрядно порівнюють переданий і прийнятий блоки інформації. Якщо помилок не знайдено, то виробляється передача наступного блоку. Якщо ж переданий і прийнятий блоки не співпадають, то передається сигнал помилки, по якому в одержаний раніше блок стирається. Після цього здійснюється повторна передача цього ж блоку інформації.
Вирішальний зворотний зв'язок (ВЗЗ) є досконалішим способом підвищення точності передачі. Звичайно ВЗЗ використовується в поєднанні з перешкодостійким кодуванням. В цьому випадку одержувач інформації аналізує прийняте повідомлення відповідно до використаного способу кодування і, тільки знайшовши невиправлені помилки, запрошує по зворотному каналу помилково прийнятий блок інформації. Таким чином, зворотний канал зайнятий тільки на час передачі запиту на повторення помилкового блоку, а в решту часу може використовуватися для
іншої мети.
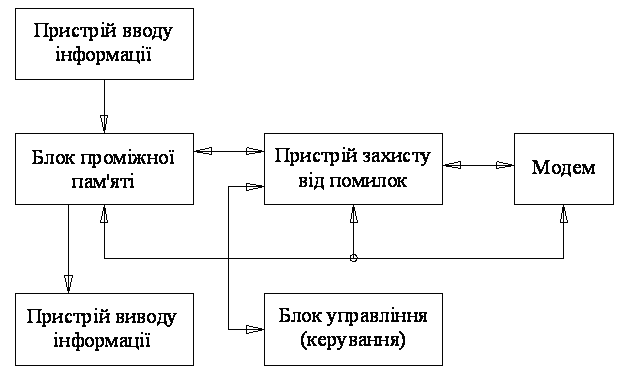
Рис. 24. Структурна схема апаратури передачі даних (АПД)
А ЦП
ЦП
перетворювачі; БЗР – блок завдання режимів;
ЦАП БК – блок завдання режимів кодування;
ПТС – пристрій ТС; БСС – синхронізація сигналів;
БР – блок ретрансляції; БДК – декодування.
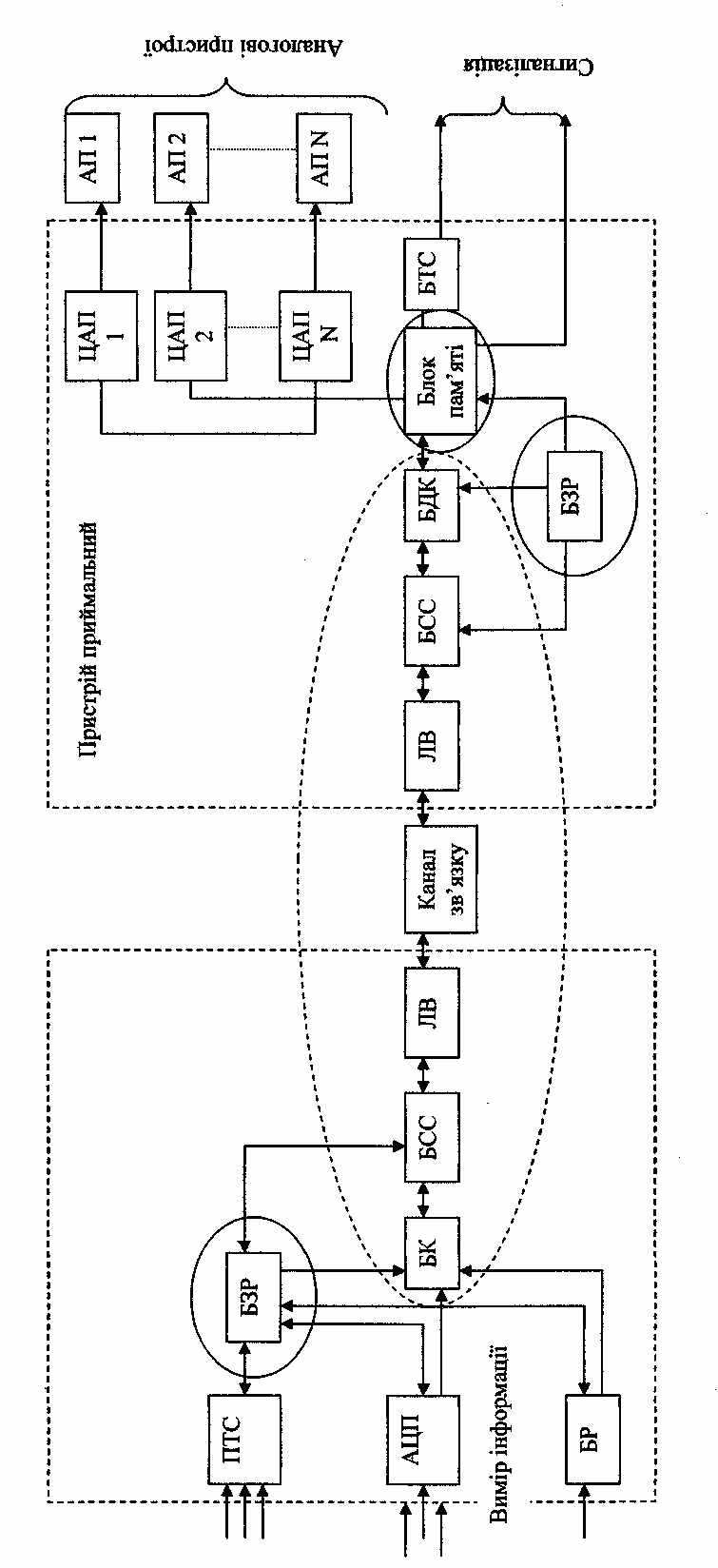
Рис. 25. Структурна схема телемеханіки
В сучасних
системах телемеханіки оптимальне
використовування різних способів
підвищення точності передачі дозволяє
понизити коефіцієнт помилок до
![]() (один помилково прийнятий символ на 10
мільйонів переданих) і менш. Це вимагає
застосування досить складної і досконалої
апаратури. Але сучасна мікроелектроніка,
зокрема, використання вбудованих
мікропроцесорів, дозволяє вирішити цю
задачу і забезпечити високу надійність
апаратури при порівняно низьких (по
відношенню, наприклад, до вартості
каналу зв'язку) витратах.
(один помилково прийнятий символ на 10
мільйонів переданих) і менш. Це вимагає
застосування досить складної і досконалої
апаратури. Але сучасна мікроелектроніка,
зокрема, використання вбудованих
мікропроцесорів, дозволяє вирішити цю
задачу і забезпечити високу надійність
апаратури при порівняно низьких (по
відношенню, наприклад, до вартості
каналу зв'язку) витратах.
В якості прикладу можна привести структурні схеми апаратури передачі даних та систем телемеханіки (рис. 24, рис. 25).