3. Определитель третьего порядка. Вычисление определителя с помощью алгеб-раических дополнений (вывод).
Определителем матрицы 3-го порядка это число равное сумме произведений элементов любой строки (столбца) на алгебраические дополнения элементов этой строки ((-1)ikAik).
При вычисление определителя 3-го порядка удобно пользоваться правилом треугольника.
![]()
Минором некоторого элемента aij определителя k-го порядка называется определитель
n-1 порядка получающегося из одной путем вычеркивания строки и столбца на пересечение которых находятся элементы aij . Алгебраическим дополнением aij называется минор умноженный на (-1)i+j Aij=(-1)i+j*Mij .
Знаки миноров:
Разложение определителя по элементам строки или столбца: Определитель = сумме произведений элементов некоторой строки (столбца) на соответствующие алгебраические дополнения.
4. Обратная матрица (определение, вывод формулы).
Если определитель квадратной матрицы не равен 0, то такая матрица называется не выраженной, в противном случае выраженной. Матрица обратная квадратной матрице А – это квадратная матрица В удовлетворяющая равенству АВ=ВА. Обратная матрица существует только для квадратной и имеет тот же порядок. Обозначается А-1.
АА-1=А-1А=Е. Алгоритм нахождения обратной матрицы: 1) Найти определитель матрицы А(∆А). Если ∆А = 0, то А-1 не существует. Если ∆А≠0, то А-1 существует, то переходим к п.2. 2) Составляем матрицу алгебраических дополнений элементов матрицы А. 3) Записать обратную матрицу А-1 А-1 = 1/∆A*Ã
5. Системы линейных уравнений, основные понятия.
Системой линейных уравнений (СЛУ) состоящий из m – уравнений и n – неизвестных называется система вида:
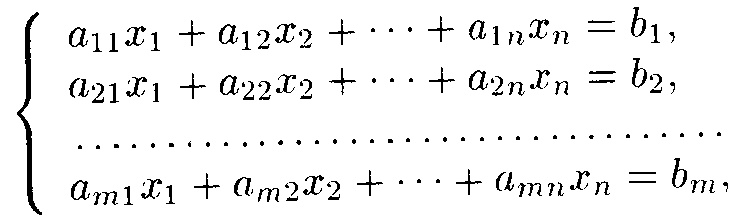 (1)
(1)
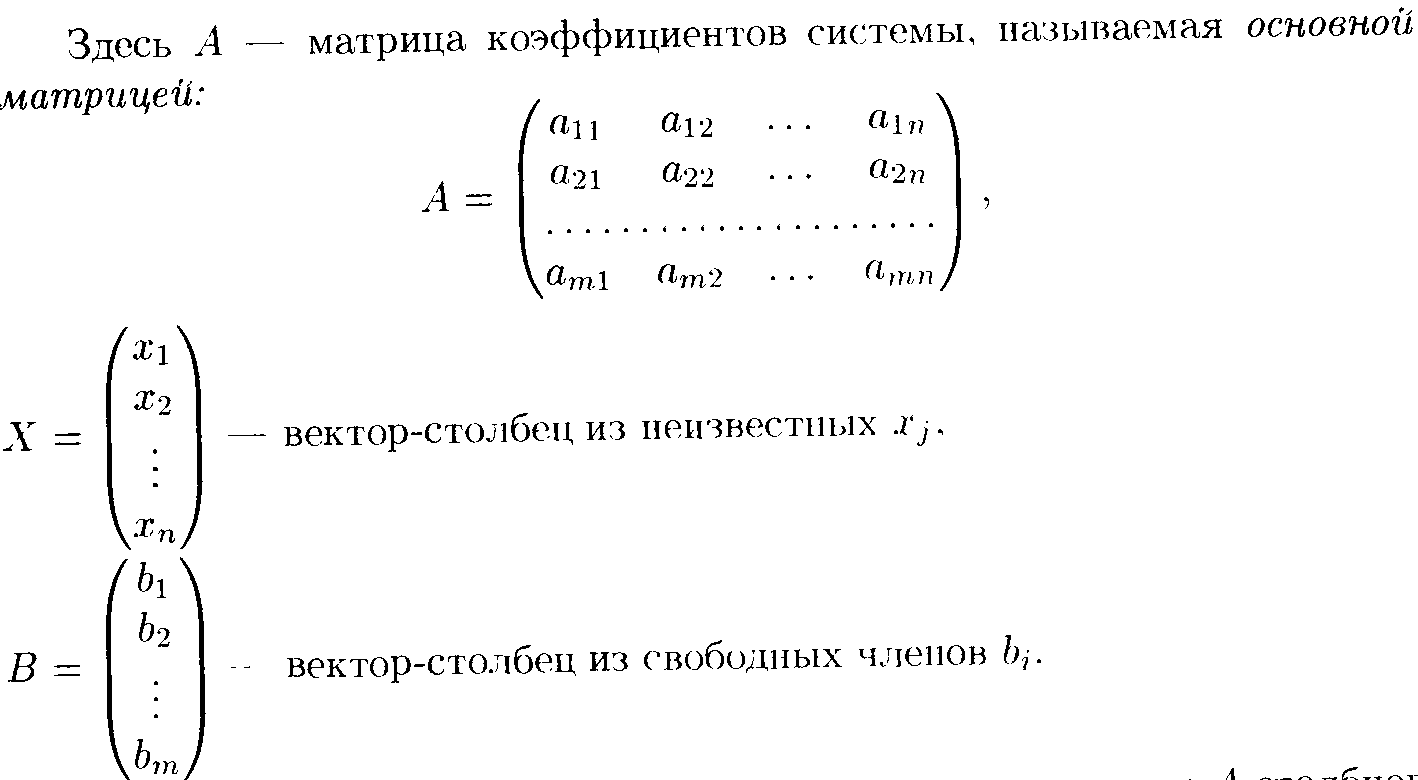
где aij (i=1,m , j=1,n) – коэффициенты, bi – свободные члены, xj – неизвестное.
Систему (1) можно записывать в матричной форме (А*Х=В) (2), где
Расширенной матрицей системы (1) называется матрица (Ã(А|В)) дополненная свободным столбцам.
Решить систему значит найти все её неизвестные. Решением системы называют такой набор значений x1= 1, x2= 2, … , xn= n, при котором все уравнения систем (1) обращаются в верные равенства. Решение систем можно так же записать матрицу столбца. СЛУ называется совместной, если она имеет хотя бы 1 решение и не совместной если она не имеет решений.
6. Решение систем линейных уравнений матричным способом.
Матричный способ: А*Х=В (2) домножим обе части равенства (2) на матрицу А-1 слева.
А-1 *А*Х= А-1 *В ≡ Е*Х= А-1 *В ≡ Х= А-1 *В (3). Отыскивание решения по формуле (3) называется матричным способом.
7. Решение систем линейных уравнений методом Крамера (вывод).
Для решения СЛУ при m=n можно использовать метод Крамера. Рассмотрим случай m=n=3:
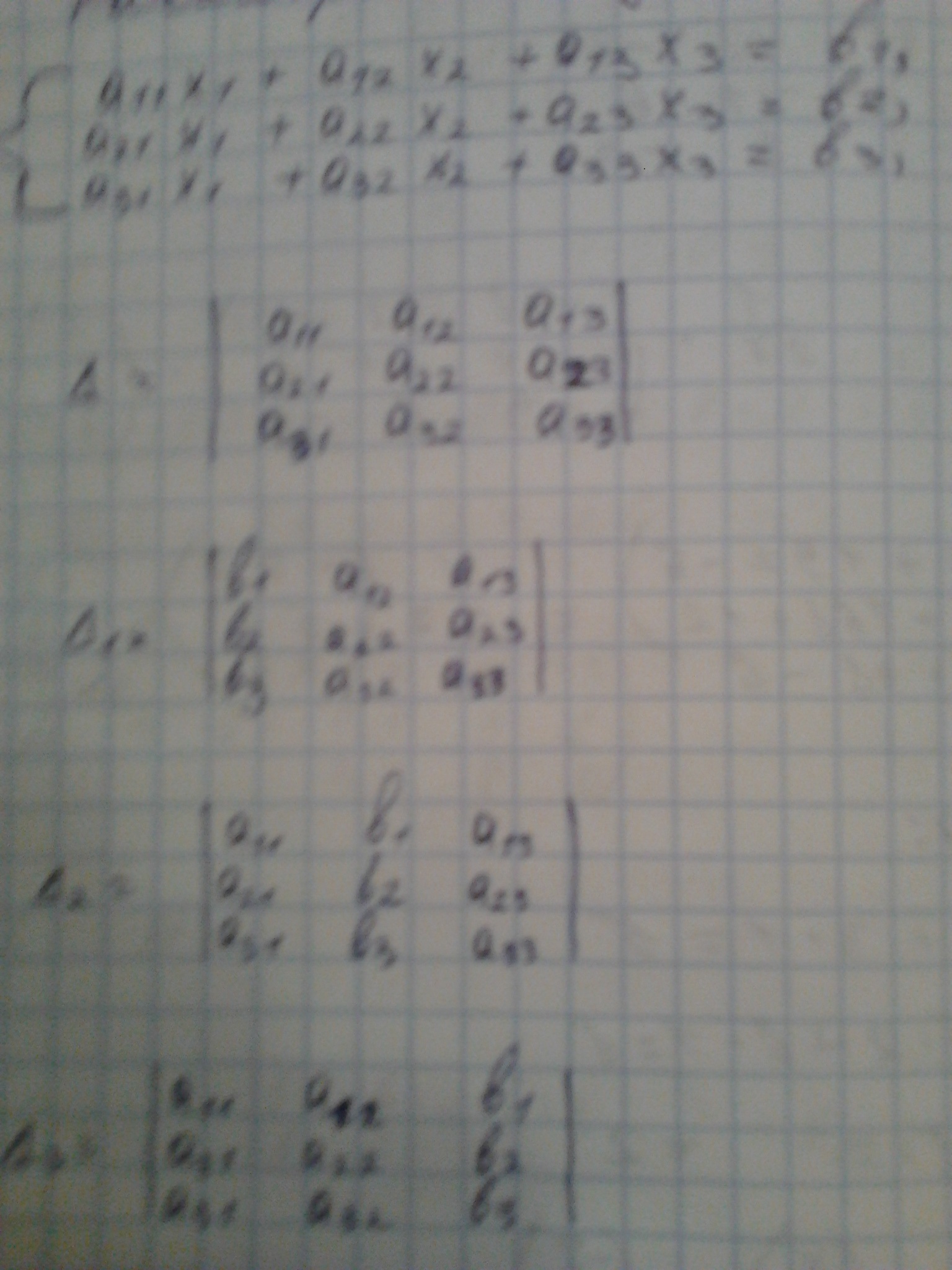
если ∆≠0, то решение существует и одно (
 )
)если ∆=0, но ∆1≠0, ∆2≠0, ∆3≠0, то решения нет
если все ∆=∆1=∆2=∆3=0, то решений бесконечное множество.
8. Ранг матрицы, вычисление ранга матрицы.
Минором k-го порядка произвольной матрицы А называется определитель, составленный из элементов матрицы, расположенных на пересечении каких либо
k-строк k-столбцов. Рангом матрицы А называется наибольший из порядков её миноров отличных от нуля.
Теорема 1:
При элементарных преобразованиях ранг матрицы не изменяется.
Теорема 2:
Ранг ступенчатой матрицы равен количеству её не нулевых строк
Следствие:
Ранг произвольной матрицы равен рангу соответствующей ей ступенчатой матрицы.
9. Решение систем линейных уравнений методом Жордана-Гаусса. Теорема Кронекера-Капелли.
Метод Гаусса – это универсальный способ решения СЛУ с произвольным количеством уравнений и неизвестных.
Достоинство:
1. Менее трудоемкий чем другие методы
2. Позволяет однозначно установить наличие или отсутствие решения, а в случае совместимости найти единственное решение ии бесконечное множество решений.
3. Определяет ранг матрицы системы.
В методе Гаусса применяют прямой и обратный ход. Прямой ход: расширенная матрица системы приводится к ступенчатому виду. Обратный ход: последовательное определения неизвестных из ступенчатой системы соответствующей ступенчатой матрицы.
Теорема Кронекера – Капели: СЛУ (1) совместно имеет решение тогда и только тогда, когда ранг матрицы систем равен рангу расширенной матрицы этой системы.
rang(A) = rang(A|B)
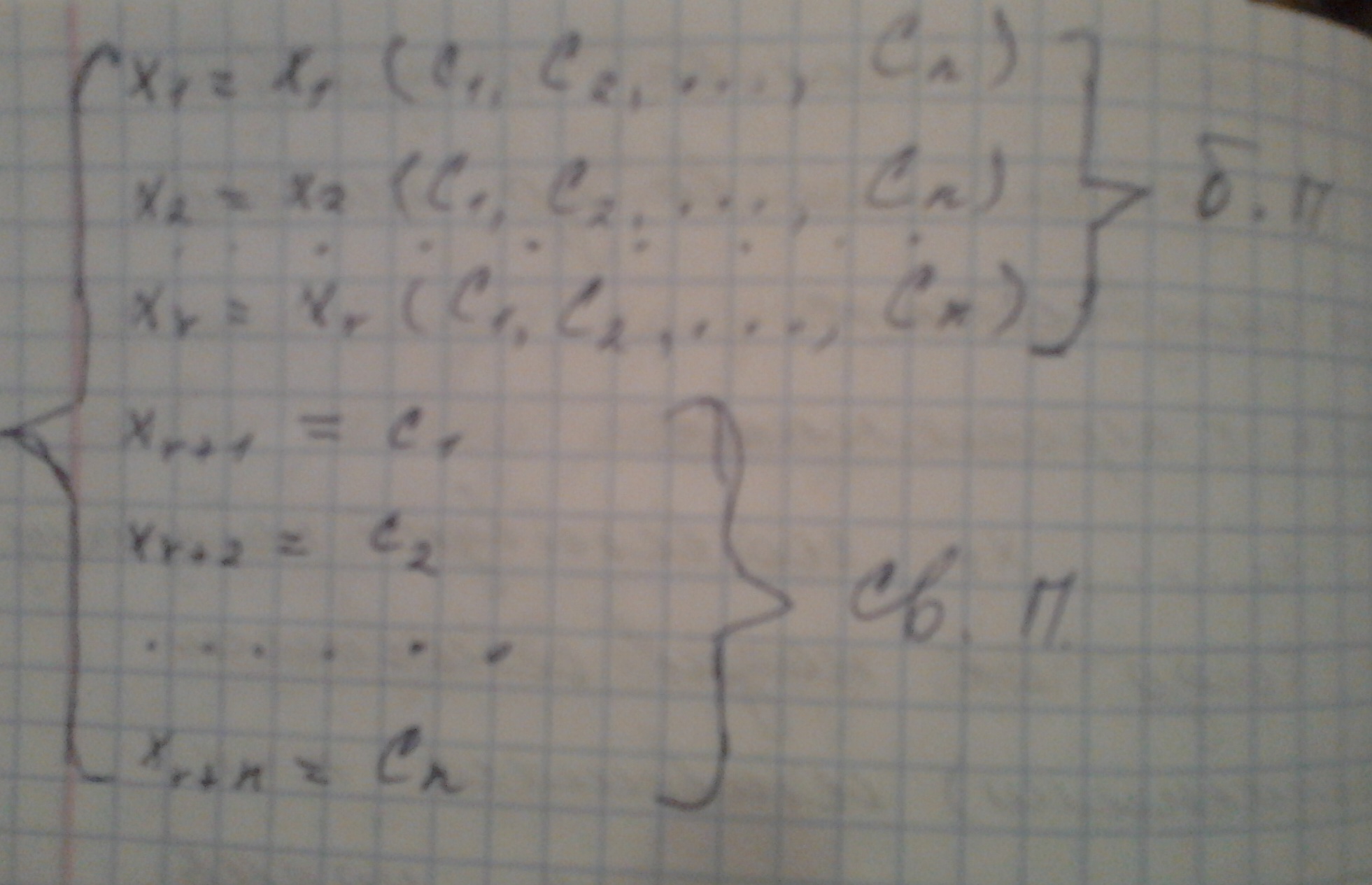
Решение приведением только расширенной матрицы к ступенчатому виду, результаты исследования можно представить в виде схемы:
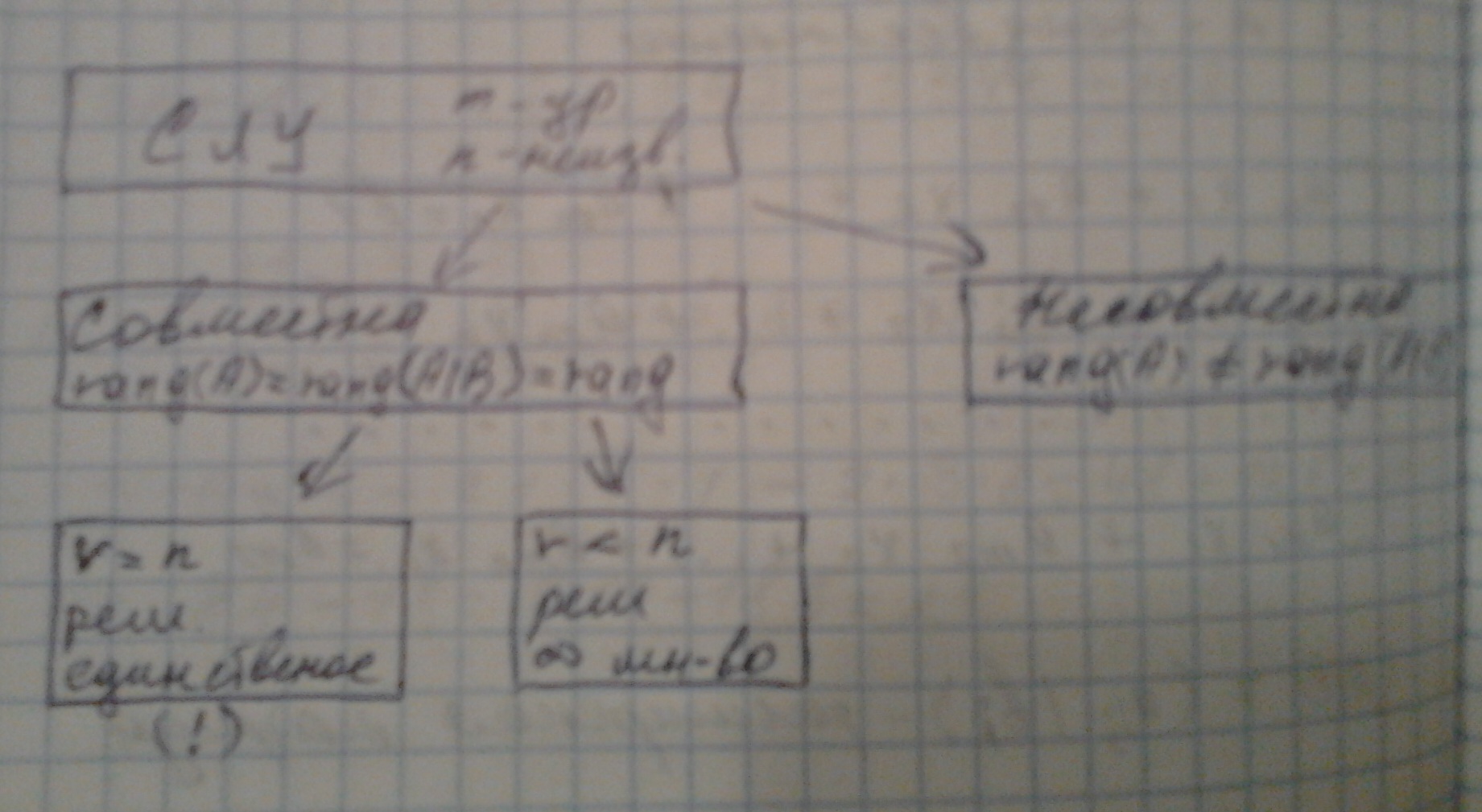
Если r < n т.е. количество ненулевых строк, а значит количество уравнений меньше количества неизвестных. Пусть r переменных: x1,x2,…,xr соответствуют найденному рангу, тогда их называют основными (или базисными) оставшиеся n-r переменных xr+1,xr+2,…,xn называются неосновными или свободными. Свободные переменные могут принимать произвольные значения. Если всем свободным значениям придать значение = 0, то найденное решение называется базисным. Выражая все базисные переменные через свободные можно получить общее решение системы придовая при этом свободным переменным произвольные значения, тогда общее решение будет иметь вид: