

Плоские механизмы. Строение механизмов по л.В. Ассуру.
Основной принцип образования механизмов, предложенный Л.В. Ассуром, заключается в следующем: любой механизм может быть образован путем последовательного присоединения кинематических цепей с нулевой степенью подвижности сначала к входному звену и к стойке, а затем и к любым другим звеньям. И, наоборот, плоский механизм всегда можно разделить на механизм I-го класса и группы Ассура. Рассмотреть строение механизма – это значит установить, из каких структурных групп состоит данный механизм, и в какой последовательности они присоединены друг к другу. Для выявления класса механизма необходимо расчленить его на группы Ассура, начиная отсоединение с наиболее удаленных от входного звена. При этом степень подвижности оставшейся части механизма не должна изменяться. Класс всего механизма определяется по наивысшему классу группы Ассура, входящей в механизм.
Замещающий механизм. Структурные группы л.В.Ассура и их классификация.
Замена высших кинематических пар:
Для любого плоского механизма, содержащего высшие кинематические пары, можно построить так называемый заменяющий механизм, который не содержит высших пар, но эквивалентен заменяемому механизму по следующим показателям:
1) в структурном отношении (имеет ту же подвижность);
2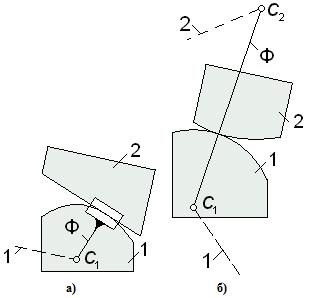 )
в отношении кинематики (при тех же
законах движения входных звеньев
остаются прежними законы движения
выходных, сохраняются также траектории
и законы движения всех точек);
)
в отношении кинематики (при тех же
законах движения входных звеньев
остаются прежними законы движения
выходных, сохраняются также траектории
и законы движения всех точек);
3) в силовом отношении.
Если высшая пара образована профилями переменной кривизны, то вместо термина «заменяющий» используют «мгновенно-заменяющий».
При выполнении процедуры замены каждой высшей пары вводится так называемое фиктивное звено (на рис. обозначено буквой Ф), участвующее в двух парах пятого класса: либо в поступательной и вращательной (если один из профилей – прямая), либо в двух вращательных парах.
Центры шарниров фиктивных звеньев всегда совпадают с центрами кривизны контактирующих профилей.турного и кинематического исследования.
Задачи и методы анализа.
Кинематический анализ механизма – исследование его основных параметров с целью изучения законов изменения и на основе этого выбор из ряда известных наилучшего механизма. По сравнению с синтезом анализ механизма широко используется в практике.
Кинематический анализ механизма выполняется либо для заданного момента времени, либо для заданного положения входного звена; иногда для анализируемого положения механизма задают взаимное расположение каких-либо его звеньев.
Цели: 1. Определение кинематических характеристик звеньев: перемещение; скорость; ускорение; траектория движения; функция положения при известных законах движения входных (ведущих) звеньев.
2. Оценка кинематических условий работы рабочего (выходного) звена.
3. Определение необходимых численных данных для проведения силового, динамического, энергетического и других расчётов механизма.
Исходные данные:1. Кинематическая схема механизма.
2. Размеры и иные геометрические параметры звеньев (но только такие, которые не изменяются при движении механизма).
3. Законы движения входных звеньев (или параметры движения, например, угловая скорость и угловое ускорение входного звена в выбранном для анализа положении механизма).
Для механизмов, подчиняющихся классификации Л. В. Ассура, порядок кинематического анализа определяется формулой строения: вначале находят параметры движения начальных механизмов и затем – структурных групп в порядке следования их в формуле строения. Здесь следует руководствоваться простым правилом: кинематика любого элемента формулы строения может быть изучена только после того, как она изучена для всех предшествующих в этой формуле элементов.
Задачи:
- о положениях звеньев механизма. Определение траекторий движения точек;
- о скоростях звеньев или отдельных точек механизма;
- об ускорениях звеньев или отдельных точек механизма.
Методы:
- графический (или метод графиков и диаграмм);
- графоаналитический (или метод планов скоростей и ускорений);
- аналитический;
- экспериментальный.