

6. Выбор структуры регулятора
РЕГИ(02)- РЕГУЛЯТОР ИМПУЛЬСНЫЙ (СТАНДАРТНАЯ КОНФИГУРАЦИЯ)
НАЗНАЧЕНИЕ.
Стандартная конфигурация «Регулятор импульсный РЕГИ» (в дальнейшем РЕГИ) предназначена для построения контура регулирования с импульсным выходным сигналом.
РЕГИ включена в состав библиотеки только регулирующей модели контроллера.
ФУНКЦИОНАЛЬНОЕ ОПИСАНИЕ.
РЕГИ состоит из шести алгоритмов. Алгоритмы связаны между собой конфигурацией, показанной на рис. .

Рис.8 Структура регулятора РЕГИ
Регулятор помимо алгоритма регулирования содержит ручной задатчик, алгоритм ручного управления, алгоритм оперативного контроля Входной сигнал и сигнал, характеризующий положение исполнительного механизма, подаются на аналоговые входы контроллера (соответственно вход 01 и 02 группа А). Выходной сигнал формируется на импульсном выходе контроллера (выход 01, группа А).
РЕГИ помещается только в первый контур. Остальные три контура (алгоблоки 02-04) оставлены свободными, поэтому при необходимости в них могут помещаться нужные алгоритмы.
РЕГИ помимо функций регулирования обеспечивает также функции оперативного управления в первом контуре, а именно ручное изменение сигнала задания, переход на ручной режим и ручное изменение выхода, контроль входного сигнала (регулируемого параметра), и сигнал рассогласования, а также контроль сигнала задания и выходного сигнала.
Алгоритм РЕГИ имеет параметры настройки, представленные в таблице. После введения РЕГИ в алгоблоке 09 на входе 03 параметр настройки "номер контура NK " должен быть установлен на значение NK=1
После ввода РЕГИ конфигурация может видоизменяться и дополняться другими алгоритмами, в ней может изменяться конфигурация и параметры настройки в соответствии со стандартными правилами программирования.
Таблица 4.
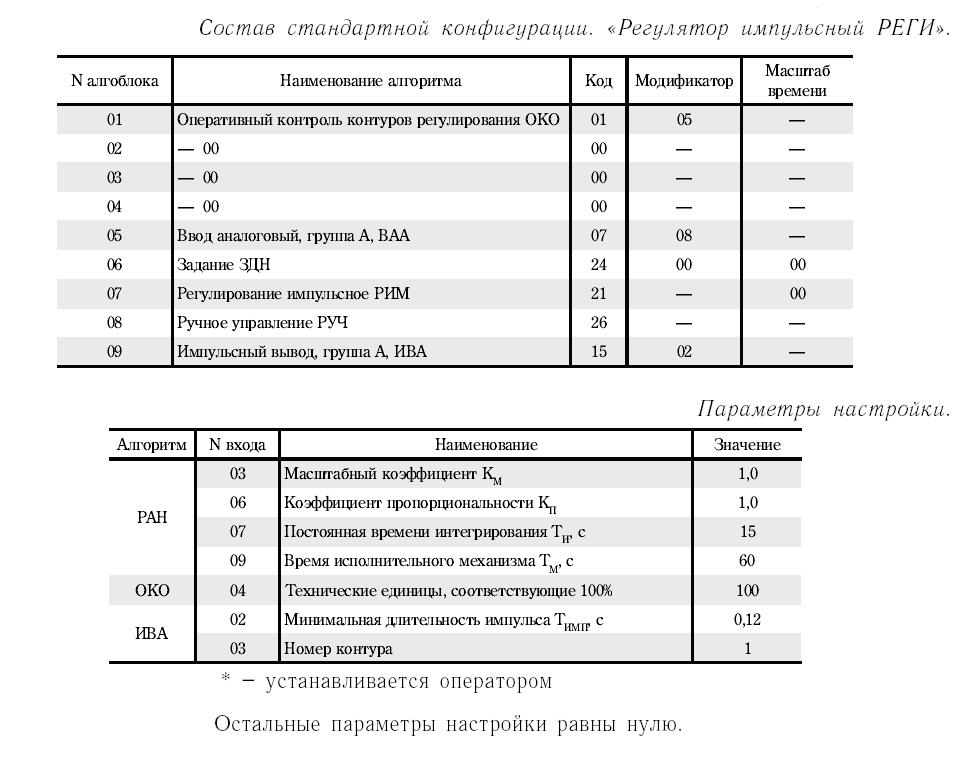
Таблица 5.

7. Разработка функциональной схемы регулятора
Алгоритм РИМ- регулирование импульсное
Алгоритм "РИМ" применяется для реализации любого в пределах ПИД закона регулирования в комплекте с исполнительным механизмом постоянной скорости. Алгоритм применяется в сочетании с алгоритмами широтно-импульсного модулирования (ИВА, ИВБ, ИМП), которые преобразуют выходной аналоговый сигнал алгоритма РИМ в широтно-импульсную последовательность импульсов, управляющих исполнительным механизмом постоянной скорости. Алгоритм содержит узел настройки, позволяющий автоматизировать процесс настройки регулятора. Функциональная схема алгоритма "РИМ" представлена на рис.47.
Элемент 3, выделяющий сигнал рассогласования ∑ (сумматор), суммирует два входных сигнала. Один из этих сигналов (на входе 02) масштабируется в элементе 1, фильтруется (демпфируется) элементом 2 и инвертируется. Сигнал рассогласования е на
выходе этого звена (без учета фильтра) равен е=Х1-Км-Х2, где Км-масштабный коэффициент.
Фильтр низких частот представляет инерционное звено первого порядка с передаточной функцией W(p)=1/(TOP+1), где Тф -постоянная времени фильтра
Сигнал е2 формируется в соответствии с условием:
г де
АХ - заданное значение зоны нечувствительности.
де
АХ - заданное значение зоны нечувствительности.
Э лемент
5 - ППД2
- имеет передаточную функцию вида:
лемент
5 - ППД2
- имеет передаточную функцию вида:
где Тм - время полного перемещения вала исполнительного механизма, движущегося с максимальной скоростью.
В сочетании с интегрирующим исполнительным механизмом, имеющим передаточную функцию Wим(р)=1/ТмР, общая передаточная функция будет иметь вид:

где Кп - коэффициент пропорциональности (передачи) регулятора, параметр настройки П- части регулятора; Ти - постоянная времени интегрирования - параметр динамической настройки интегральной части регулятора; Кд - коэффициент дифференцирования, равный Кд=Тд/Ти, где Тд - постоянная времени дифференцирования - параметр настройки Д- части регулятора.
Принято, что при Кд-Ти>819 значение Тд=оо.
Значение Хд<0 воспринимается алгоритмом как Хд=0.
Алгоритм имеет два выхода. Выход Y(k) - основной выход алгоритма. На выходе Y(e) формируется отфильтрованный сигнал рассогласования.
Алгоритм РИМ относится к группе следящих и имеет каскадный выход Y(k) и один каскадный вход Х^к). Команда отключения поступает извне на выход Y(k). В режиме отключения звенья Д и Д2 обнуляются и при выполнении необходимых условий алгоритм. выполняет процедуру обратного счета, формируя на каскадном входе Х1к) сигнал Х0=Км-Х2. На команду запрета алгоритм не реагирует. Поступившие извне команды отключения и запрета вместе с значением начальных условий Х0 транслируются алгоритмом через вход X1(K) предвключенному алгоритму.
Алгоритм содержит узел настройки 6, состоящий из переключателя режима "Работа - Настройка", нуль - органа 8 и дополнительного фильтра 7 с постоянной времени Тф1.
Режим работы нуль - органа определяется условием:

где YHo - сигнал на выходе нуль - органа (YHo=Ye).
Наименование входов - выходов алгоритма РИМ приведено в табл.6.
Т аблица
6.
аблица
6.
При подаче дискретного сигнала на вход СНас=1 алгоритм переходит в режим настройки. В этом режиме в замкнутом контуре регулирования устанавливаются автоколебания.
Параметры этих колебаний (амплитуда и период), контролируемые на выходе Ys, используются для уточнения параметров динамической настройки контура регулирования. Для перехода в режим работы устанавливается сигнал СНас=0