

6.Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М, находящихся на расстоянии r одна от другой, равна
![]() .
(11)
.
(11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Еp = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, Me – масса Земли, Re – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
![]() .
(12)
.
(12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « Re) равна
![]() ,
,
где
![]() –
модуль ускорения свободного падения
вблизи поверхности Земли.
–
модуль ускорения свободного падения
вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x1 до конечного значения x2 (рис. 4, б, в).
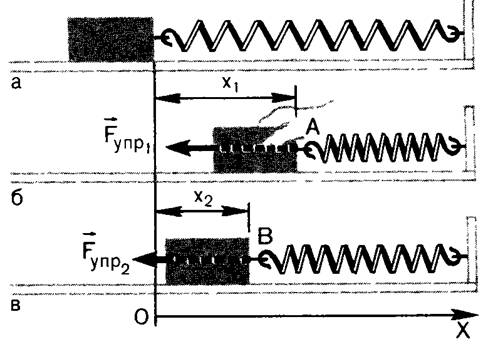
Рис. 4
Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x) и умножить на модуль перемещения:
![]() ,
(13)
,
(13)
где
![]() .
Отсюда
.
Отсюда
![]() или
или
![]() .
(14)
.
(14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
![]() .
(15)
.
(15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
![]() .
(16)
.
(16)
Если x2 = 0 и x1 = х, то, как видно из формул (14) и (15),
![]() .
.
7.Закон сохранения механической энергии системы. Из уравнения (10.15) следует,
Полная механическая энергия замкнутой консервативной системы не изменяется при любых перемещениях тел. Это утверждение называется законом сохранения механической энергии системы.
Заметим, что в процессе движения тел системы один вид энергии может переходить в другой.

Причины изменения механической энергии системы. Полной механической энергией системы тел называется сумма кинетической и потенциальной энергий:
E = Eк + Eп.
Какие причины могут изменить полную механическую энергию?
Полная механическая энергия может изменяться в результате следующих причин:
|
внешнего воздействия на систему (толчки, приближение из вне магнита, заряженных тел и т.п.); |
|
наличия внутренних неконсервативных сил. Например, силы сопротивления вызывают уменьшение механической энергии системы "шар, Земля, воздух, нить". |
9-10.Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
![]() ,
,
где:
mi — масса i-й точки,
ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.
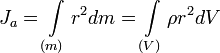 ,
,
где:
dm = ρdV — масса малого элемента объёма тела dV,
ρ — плотность,
r — расстояние от элемента dV до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то
11.Теоре́ма Гю́йгенса — Ште́йнера, или просто теорема Штейнера (названа по имени швейцарского математика Якоба Штейнера и голландского математика, физика и астронома Христиана Гюйгенса): момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела JC относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния d между осями:
![]()
где
JC — известный момент инерции относительно оси, проходящей через центр масс тела,
J — искомый момент инерции относительно параллельной оси,
m — масса тела,
d — расстояние между указанными осями.
Вывод
Момент инерции, по определению:
![]()
Радиус-вектор
![]() можно
расписать как разность двух векторов:
можно
расписать как разность двух векторов:
![]() ,
,
где
![]() —
радиус-вектор расстояния между старой
и новой осью вращения. Тогда выражение
для момента инерции примет вид:
—
радиус-вектор расстояния между старой
и новой осью вращения. Тогда выражение
для момента инерции примет вид:
![]()
Вынося за сумму , получим:
![]()
Поскольку старая ось проходит через центр масс, то суммарный импульс тела будет равен нулю:
![]()
Тогда:
![]()
Откуда и следует искомая формула:
,
где JC — известный момент инерции относительно оси, проходящей через центр масс тела.
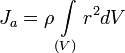
Момент силы, действующей на материальную точку. Пусть частица A движется произвольным образом относительно точки О под действием силы F (см. рис. 6.2). Моментом силы частицы относительно закрепленной точки называется величина, равная векторному произведению:
M = [r·F], (6.3) где r - радиус вектор точки приложения силы F.
кинетическая энергия твердого тела при вращательном движении. Кинетическая энергия твердого тела складывается из кинетических энергий его частей Ei. Рассчитаем значение Ei для элементов твердого тела.
Ei = mi·vi2/2 = mi·w2·ri2/2.
Кинетическая энергия твердого тела будет равна:
Eк = w2/2·mi·ri2 = I·w2/2. (8.13)
Заметим, что формула для расчета Eк похожа на выражение для определения кинетической энергии поступательного движения тела, только роль меры инертности в этом случае играет момент инерции, а не масса и характеристикой движения является угловая, а не линейная скорость твердого тела.
Момент импульса
![]() частицы
относительно некоторого начала отсчёта
определяется векторным
произведением её радиус-вектора
и импульса:
частицы
относительно некоторого начала отсчёта
определяется векторным
произведением её радиус-вектора
и импульса:
![]()
где
![]() —
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
—
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
![]() —
импульс частицы.
—
импульс частицы.
Для нескольких частиц момент импульса определяется как (векторная) сумма таких членов:
![]()
где
![]() —
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
—
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
(В пределе количество частиц может быть
бесконечным, например, в случае твердого
тела с непрерывно распределенной массой
или вообще распределенной
системы это может быть записано
как
![]() где
где
![]() -
импульс бесконечно малого точечного
элемента системы).
-
импульс бесконечно малого точечного
элемента системы).
В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
Из определения момента импульса следует его аддитивность: как, для системы частиц в частности, так и для системы, состоящей из нескольких подсистем, выполняется:
![]() .
.
Закон изменения момента импульса.
Рассмотрим произвольную систему тел. Моментом импульса системы назовем величину L, равную векторной сумме моментов импульсов отдельных ее частей Li, взятых относительно одной и той же точки выбранной системы отсчета.
L = ΣLi.
Найдем скорость изменения момента импульса системы. Проведя рассуждения, аналогичные описанию вращательного движения твердого тела, получим, что
скорость изменения момента импульса системы равна векторной сумме моментов внешних сил M, действующих на части этой системы.
dL/dt = M.
Причем вектора L и M задаются относительно одной и той же точки O в выбранной СО. Уравнение (21) представляет собой закон изменения момента импульса системы.
Причиной изменения момента импульса является действующий на систему результирующий момент внешних сил. Изменение момента импульса за конечный промежуток времени можно найти, воспользовавшись выражением
 .
.
Приращение момента импульса системы равно импульсу результирующего момента внешних сил, действующих на нее.
В неинерциальной системе к моменту внешних сил необходимо прибавить момент сил инерции относительно выбранной точки O.