8. Переходные процессы при нелинейных характеристиках двигателя и механизма
Особенности расчета переходных процессов в нелинейных цепях
П ереходные
процессы в нелинейных
электрических цепях описываются
нелинейными дифференциальными
уравнениями, общих методов
интегрирования которых не существует.
На нелинейные цепи не распространяется
принцип суперпозиции, поэтому основанные
на нем методы, в частности классический
или с использованием интеграла Дюамеля,
для расчета данных цепей не применимы.
ереходные
процессы в нелинейных
электрических цепях описываются
нелинейными дифференциальными
уравнениями, общих методов
интегрирования которых не существует.
На нелинейные цепи не распространяется
принцип суперпозиции, поэтому основанные
на нем методы, в частности классический
или с использованием интеграла Дюамеля,
для расчета данных цепей не применимы.
Анализ переходных режимов в электрических цепях требует использования динамических характеристик нелинейных элементов, которые, в свою очередь, зависят от происходящих в них динамических процессов и, следовательно, в общем случае наперед неизвестны. Указанное изначально обусловливает в той или иной степени приближенный характер расчета переходных процессов.
Переходный процесс в нелинейной цепи может характеризоваться переменной скоростью его протекания в различные интервалы времени. Поэтому понятие постоянной времени в общем случае не применимо для оценки интенсивности протекания динамического режима.
Отсутствие общности подхода к интегрированию нелинейных дифференциальных уравнений обусловило наличие в математике большого числа разнообразных методов их решения, нацеленных на различные типы уравнений. Применительно к задачам электротехники все методы расчета по своей сущности могут быть разделены на три группы:
– аналитические методы, предполагающие либо аналитическое выражение характеристик нелинейных элементов, либо их кусочно-линейную аппроксимацию;
– графические методы, основными операциями в которых являются графические построения, часто сопровождаемые вспомогательными вычислительными этапами;
– численные методы, основанные на замене дифференциальных уравнений алгебраическими для приращений переменных за соответствующие интервалы времени.
Аналитические методы расчета
Аналитическими называются методы решения, базирующиеся на аналитическом интегрировании дифференциальных уравнений, описывающих состояние нелинейной цепи с использованием аналитических выражений характеристик нелинейных элементов.
Основными аналитическими методами, используемыми при решении широкого круга задач электротехники, являются:
– метод условной линеаризации;
– метод аналитической аппроксимации;
– метод кусочно-линейной аппроксимации.
9. Взаимосвязанный электропривод. Электропривод с механическим соединением валов.
ВЗАИМОСВЯЗАННЫЙ ЭЛЕКТРОПРИВОД
Для приведения в движение исполнительных органов ряда рабочих машин используются не один, а два или более электродвигателей, что позволяет получить некоторые специфические механические характеристики ЭП, снизить суммарный момент инерции системы по сравнению с однодвигательными приводами ЭП, создавать мощные ЭП на базе серийных двигателей относительно небольшой мощности, повысить надежность работы привода за счет резервирования, а в ряде случаев - упростить механическую часть его и рабочих машин.
Е сли
два или несколько двигателей работают
на общий вал (механически связаны
между собой), то такой взаимосвязанный
ЭП называется многодвигательным.
Взаимосвязанный ЭП, обеспечивающий
совместную работу двух или нескольких
двигателей, валы которых не имеют
непосредственной механической связи,
а их взаимодействие обеспечивается
электрической схемой, называется
электрическим валом.
сли
два или несколько двигателей работают
на общий вал (механически связаны
между собой), то такой взаимосвязанный
ЭП называется многодвигательным.
Взаимосвязанный ЭП, обеспечивающий
совместную работу двух или нескольких
двигателей, валы которых не имеют
непосредственной механической связи,
а их взаимодействие обеспечивается
электрической схемой, называется
электрическим валом.
В качестве примеров можно назвать взаимосвязанные ЭП поворотных платформ мощных экскаваторов и крупных портальных кранов, шлюзовых затворов и аэродинамической трубы.
ЭЛЕКТРОПРИВОД С МЕХАНИЧЕСКИМ СОЕДИНЕНИЕМ ВАЛОВ ДВИГАТЕЛЕЙ
При механическом соединении валов двигателей скорость их одинакова, а момент ЭП представляет собой алгебраическую сумму моментов отдельных двигателей. Запишем суммарный момент двух двигателей, имеющих прямолинейные характеристики: М = М1 + М2=Мк1(w01-w)/w01+Мк2(w02-w)/w02, где Мк1, Мк2, w01, w02 - соответственно моменты короткого замыкания, скорости холостого хода, w - текущая скорость.
Механическая характеристика ЭП в этом случае имеет в два раза большую жесткость, а скорость его идеального холостого хода соответствует скорости холостого хода каждого двигателя. Нагрузка электродвигателей с идентичными характеристиками распределяется между ними равномерно.
В большинстве случаев механические характеристики двигателей не являются идентичными и они могут иметь различные скорости идеального холостого хода или жесткости. При совместной работе таких двигателей распределение нагрузки между ними происходит неравномерно.
При одинаковых скоростях идеального холостого хода, но различных жесткостях характеристик момент нагрузки Mс = M1 + M2 распределяется между двигателями так: двигатель, имеющий более жесткую характеристику, нагружается в большей степени и, наоборот, двигатель с мягкой характеристикой оказывается менее загруженным.
При различных скоростях холостого хода и одинаковых жест- костях характеристик
двигатели с большей скоростью холостого хода нагружаются в большей степени.
М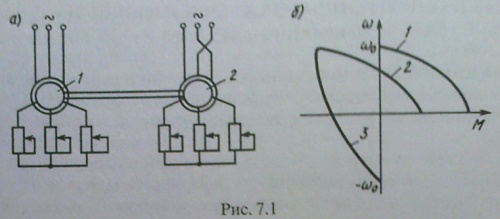 ногодвигательный
ЭП нашел достаточно широкое применение
в подъемно-транспортных машинах и
механизмах, так как часто бывает
необходимо осуществлять их перевод на
пониженную скорость перед остановкой.
ногодвигательный
ЭП нашел достаточно широкое применение
в подъемно-транспортных машинах и
механизмах, так как часто бывает
необходимо осуществлять их перевод на
пониженную скорость перед остановкой.
В схеме ЭП с использованием двух асинхронных двигателей, приведенной на рис. 7.1, а, для понижения скорости двигатель 1 оста ется работать в двигательном режиме, а двигатель 2 переводится изменением чередования фаз в режим торможения противовключе- нием. На рис. 7.1, б приведены соответственно механические характеристики 1 и 3 этих двигателей и результирующая характеристика 2 ЭП, полученная суммированием моментов двигателей при одной и той же скорости. Участок характеристики 2 ЭП, расположенный в первом квадранте, соответствует пониженной скорости движения исполнительного органа. Отметим, что с энергетической точки зрения продолжительная работа на пониженной скорости такого ЭП является нецелесообразной, так как сопровождается большими потерями энергии в двигателе 2 (см. рис. 7.1, а). Низкая скорость двухдвигательного ЭП (рис. 7.2, а) обеспечивается при работе АД 1 в режиме двигателя, а АД 2 - в режиме динамического торможения.