

52.Расчет регулировочных резисторов в цепи ротора асинхронного двигателя.
Обычно
требуется определить
сопротивление дополнительного резистора
Я2д,
при
включении которого АД будет иметь
заданную искусственную характеристику
или же она будет проходить через заданную
точку с координатами( ).
При
этом предполагается, что естественная
механическая характеристика АД известна
(рассчитана или снята экспериментально),
а требуемая искусственная характеристика
задана по условиям пуска или регулирования
скорости.
).
При
этом предполагается, что естественная
механическая характеристика АД известна
(рассчитана или снята экспериментально),
а требуемая искусственная характеристика
задана по условиям пуска или регулирования
скорости.
Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика задана полностью и определена точка критического момента (например, характеристика 2 на рис. 5.7), то в этом случае расчет основывается на формуле (5.10), с помощью которой находится отношение критических скольжений АД на естественной 1 и искусственной 2 характеристиках:
Sк.е/Sк.и=Rр'/(Rр'+ R2д1') = Rр/(Rр + R2д1), (5.22)
где Rp - сопротивление фазы обмотки ротора АД. Из (5.22) определим искомое значение
R2д1=Rр(sк.и /sк.е -1). (5.23)
Формула
(5.23) справедлива не только для критического
момента Мк
, но
и для любого фиксированного момента
Ми. Таким образом, если задана
некоторая точка
 искусственной характеристики 3
(см.
рис. 5.7) с координатами Ми
, sи
, то
искомое сопротивление резистора можно
найти по формуле
искусственной характеристики 3
(см.
рис. 5.7) с координатами Ми
, sи
, то
искомое сопротивление резистора можно
найти по формуле
R2д2=Rр(sи /sе -1). (5-24)
где sе - скольжение АД на естественной характеристике 1, соответствующее моменту Ми .
Отметим, что значение сопротивления обмотки ротора можно найти приближенно по следующей формуле с использованием паспортных данных АД:
Rр=E2ksном / (корень из 3*I2ном) (5.25)
Если искусственная характеристика задана своей рабочей частью, то для расчета резисторов можно использовать метод отрезков, который подробно рассматривался в гл. 4 применительно i ДПТНВ. На рис. 5.7 выполнено такое построение, для чего проведена вертикальная линия, соответствующая номинальному моменту М , и отмечены характерные точки а, Ь, с, d, е. Тогда сопротиБ ление искомого резистора для получения характеристики 2
R2д1=Rномbc/ae (5-26)
где Rном=E2k/( корень из 3*I2ном )- номинальное сопротивление АД; Е2k -
ЭДС ротора при s=l; I2ном- номинальный ток ротора.
С помощью метода отрезков и рис. 5.7 при необходимости по естественной характеристике 1 можно найти и сопротивление фазы обмотки ротора
Rр =R2номab/ae (5.27)
53-Регулирование скорости ад изменением напряжения.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение от Uрег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
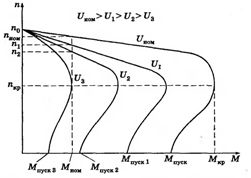
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении 17ном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.