

5.3. Проверочный расчет подшипников на долговечность.
Проверочный расчет ведем по динамической грузоподъемности для предотвращения усталостного контактного выкрашивания тел и дорожек качения.
Радиально-упорные конические роликовые подшипники входного вала 7209А, С = 62,7 кН,С0 = 50 кН,e= 0,37,Y= 1,5.
Находим силы действующие подшипники (рис.5.2): Fa = 3270H;RA= = 2683,9 Н;RB = 5745,9 Н.
Вычисляем осевые составляющие реакций опор от действия радиальных сил, которые зависят от угла контакта /2/ (см.с.186):
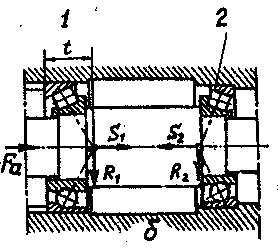
Рис. 5.2
S1 = 0,83eRB = 0,830,375745,9 = 1573,8 Н
S2 = 0,83eRA = 0,830,372683,9 = 735,1
S1> S2
Следовательно, /1/ (стр. 87):
Fa1 = S1 = 1573,8 H
Fa2 = S1 + Fa = 1573,8 + 3270 = 4843,8 H
Определяем
соотношение
![]() и сравниваем его се.
и сравниваем его се.
где V – коэффициент вращения (при вращении внутреннего кольца V=1).
![]() ;
;
Принимаем Х = 1, Y = 0.
![]()
Принимаем Х = 0,4, Y = 1,5.
Определяем эквивалентную динамическую нагрузку по формуле /1/ (см. с. 84):
P = (XRV + YFa ) K KT, (5.9)
где K
– коэффициент безопасности, K=1;
K
– коэффициент безопасности, K=1;
KT – температурный коэффициент (KТ = 1 при температуре подшипника менее 1000С,).
Pа = 5745,9·1·1·1 = 5745,9 Н,
Pb = (0,4·2683,9·1 + 1,5·4843,8) ·1·1 = 8339,3 Н.
Для дальнейших расчетов принимаем большее значение, т.е. Pb.
Вычисляем требуемую динамическую грузоподъемность подшипника /1/ (см.с. 84):
![]() , (5.10)
, (5.10)
![]() Н
Н
Полученная динамическая грузоподъемность подшипника находится в пределах допускаемых значений
Радиально-упорные конические роликовые подшипники выходного вала 7311, С = 65 кН, С0 = 46 кН, e = 0,36, Y = 1,6.
Находим силы действующие на подшипники (рис. 5.3): Fa = 490 H; RС = 2014 Н; RD = 2228,4 Н
Вычисляем осевые составляющие реакций опор от действия радиальных сил:
S1= 0,83e RС = 0,830,362014 = 601,8 Н
S2= 0,83e RD = 0,830,362228,4 = 665,8 Н
S1< S2
Следовательно:
Fa1=S1 – Fa =601,8 – 490 = 118,1H
Fa2=S2 = 665,8 H
Определяем
![]() ;
;
Принимаем Х = 1, Y = 0.
![]()
Принимаем Х = 1, Y = 0.
Pc = 2014·1·1·1 = 2014 Н,
Pd = 2228,4·1 ·1·1 = 2228,4 Н.
Для дальнейших расчетов принимаем большее значение, т.е. Pd.
Вычисляем требуемую динамическую грузоподъемность подшипника:
![]() Н
Н
Полученная динамическая грузоподъемность подшипника находится в пределах допускаемых значений
5.4. Проверочный расчет шпонок.
Зубчатые колеса, шкивы, звездочки и другие детали крепятся на валах с помощью шпоночных соединений, предназначенных для передачи крутящих моментов.
В редукторах общего назначения из-за простоты конструкции, сравнительно низкой стоимости и удобства сборки и разборки широко применяются соединения призматическими шпонками (см. рис. 5.5).


Рис. 5.5 Соединение призматической шпонкой.
Сечение шпонки выбирают в зависимости от диаметра вала. Длину шпонки принимают по длине ступицы с округлением в меньшую сторону до стандартной:
![]() ,
(5.11)
,
(5.11)
где lш– длина шпонки (мм);
lст– длина ступицы (мм).
Шпонка под ведомый шкив клиноременной передачи: lш= 40 мм,b= 10 мм,h= 8 мм,t1= 5,0 мм,t2= 3,3 мм.
Шпонка на шестерне закрытой конической передачи: lш= 40 мм,b= 10 мм,h= 8 мм,t1= 5,0 мм,t2= 3,3 мм.
Шпонка на колесе закрытой конической передачи: lш= 60 мм,b= 18 мм,h= 11 мм,t1= 7,5 мм,t2= 4,4 мм.
Шпонка под ступицу муфты: lш= 56 мм,b= 14 мм,h= 9 мм,t1= 5,5 мм,t2= = 3,8 мм.
Шпонки рассчитываются на смятие по формуле: /2/ (см.с.94):
![]() (5.12)
(5.12)
где σсм – напряжение смятия (МПа);
 T– крутящий момент на валу (Н∙мм);
T– крутящий момент на валу (Н∙мм);
d– диаметр вала вместе посадки шпонки (мм);
lр– рабочая длина шпонки (мм):lр =l–bмм;
h,t1– параметры шпонки смотри рис. 5.5, (мм);
[σсм] – допускаемое напряжение смятия, 170 МПа.
Шпонка под ведомый шкив клиноременной передачи:
![]() МПа.
МПа.
Шпонка на шестерне закрытой конической передачи:
![]() МПа.
МПа.
Шпонка на колесе редуктора:
![]() МПа.
МПа.
Шпонка под полумуфту:
![]() МПа.
МПа.