

Задание № 2 механизм качания плеча робота с червячной передачей
1.
Электродвигатель.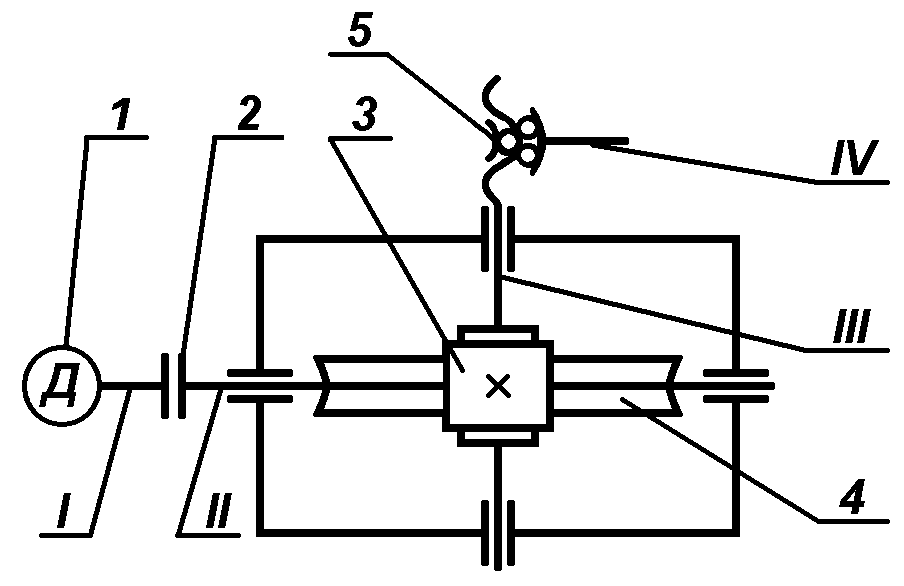
2. Соединительная муфта.
3-4. Червячная передача.
5. Шариковинтовая передача.
I-II. Валы.
III. Вал-винт.
IV. Палец для соединения с рукой
робота.
Рис.1 Кинематическая схема
Исходные данные
Предлагаемый аналог конструкции [1, кн. 3, с. 212, рис. 5. 6,а].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения вала III, об/мин.
Срок службы L, часов.
Вариант 9
PIII = 3 Вт
nIII = 90 об/мин
L = 16000 ч
Производство серийное
Описание работы механизма
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов.
Промышленные роботы позволяют освободить человека от выполнения тяжелого, быстроутомляющего ручного труда, часто не требующего от него высокой и даже средней квалификации. Они способны заменить человека на производстве и там, где его труд связан с опасностью, например во взрывоопасных помещениях, при работе с вредными веществами, в условиях, где велика вероятность травматизма и т. д.
В данной работе рассматривается механизм качания плеча робота с червячной передачей, представленный на рис.1. Принцип работы этого механизма следующий: от двигателя 1 через муфту 2 передаётся крутящий момент на червячный редуктор 3-4. Вращение выходного вала III редуктора передаётся на шарико – винтовую передачу 5, преобразовываясь в поступательное движение пальца IV руки робота.
Механизм может эксплуатироваться в повторно-кратковременном или непрерывном режиме работы, допускается воздействие кратковременных пусковых перегрузок. Допускаемая температура окружающей среды при эксплуатации составляет от -40 до + 50 градусов Цельсия. Корпус механизма должен защищать его от попадания пыли и влаги.
Предварительный выбор двигателя
Расчет требуемой мощности двигателя
По заданной мощности, снимаемой с выходного вала редуктора, с учетом КПД механизма определим требуемую мощность двигателя:
Pтр = P/η ∙β = 3/0,4∙1,2= 9 Вт ,
где η – предварительное значение КПД (0,4 - 0,7) ,
β – коэффициент запаса мощности (1,2 - 2,5).
2.2.Выбор двигателя
По требуемой мощности выбираем электродвигатель постоянного тока серии СЛ с параллельным возбуждением.
Его технические данные:
|
Тип двигателя |
UH,В |
РН Вт |
nдв об/мин |
МН Г-дм |
Ток возбуж- дения, а |
Ток якоря.а |
Момент инер- ции якоря, Г-смг |
Габариты, мм |
Веc, кг | |||||
|
L |
D |
L1 |
l |
d |
| |||||||||
|
СЛ-121 |
110 |
13 |
3600 |
35 |
0,05 |
0, 22 |
138 |
104 |
70 |
63,5 |
9,5 |
4 |
1,2 | |