

4 Визначення якості процесу регулювання
Передаточна функція замкненої системи по управлінню
Виразимо вихідний сигнал
Omega:=Wуpr*Uz/p;
![]()
Підставивши чисельні дані отримаємо:
![]()
Перейдемо в часову область
Omega:=simplify(invlaplace(Omega,p,t));
![]()
Побудуємо перехідну характеристику
plot(Omega,t=0..2,color=black);
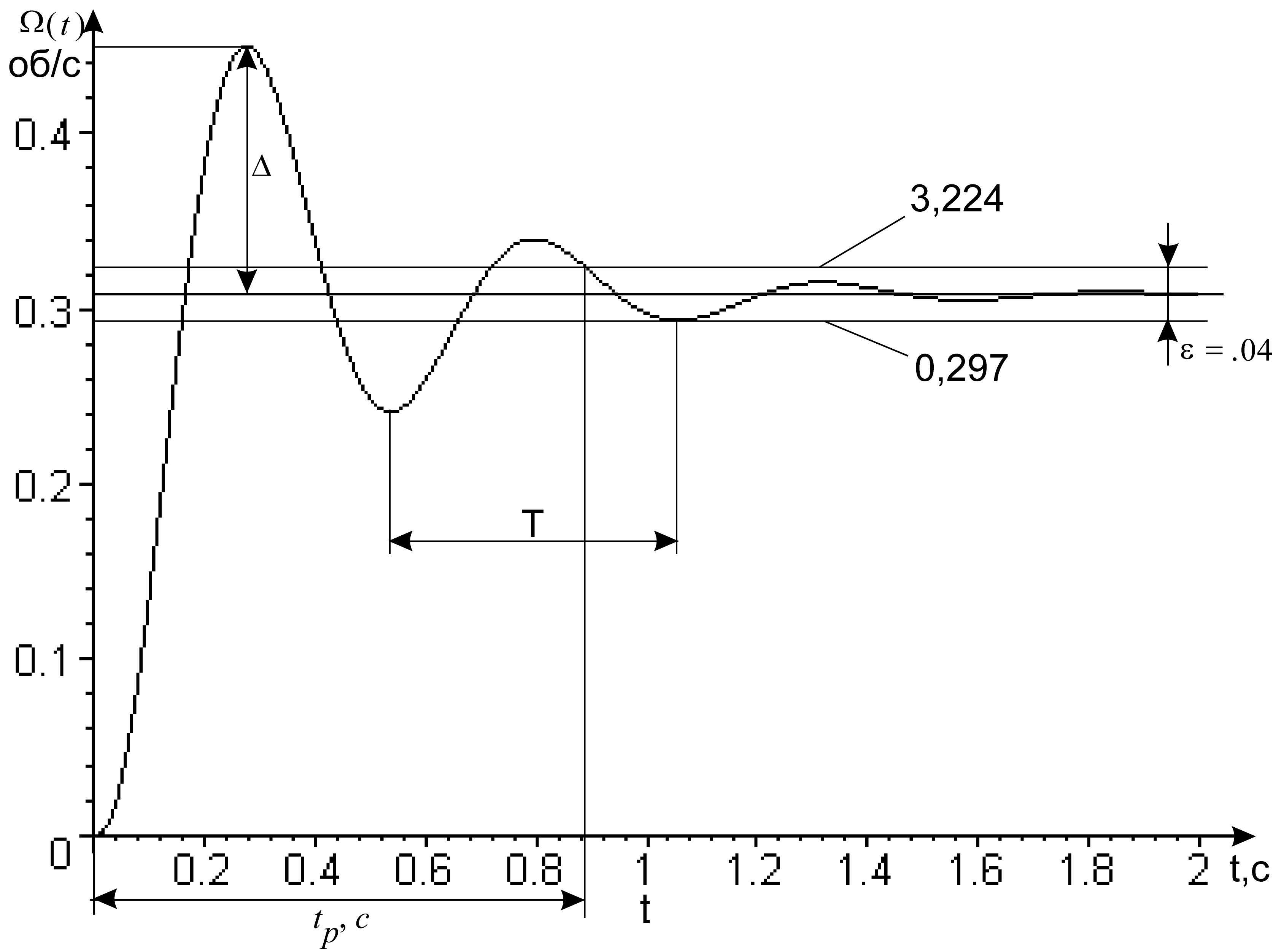
Рис 12 – Перехідна характеристика
По графіку знайдемо основні параметри перехідної характеристики:
а) час регулювання tр = 0,88 с;
б) перерегулювання G% = (0.14/0.31)·100% = 45%
в) період коливань T1 = 0,53 с;
г) частота
коливань
ω1
= 2·π/Т1
= 2·π /0,53
![]() рад/с
или
рад/с
или
ƒ1 = 1/Т1 = 1/0,53 = 1,88 Гц;
д) кількість коливань N = 3.
5 Визначення точності системи
Точність системи автоматичного управління є найважливішим показником якості системи. Залежно від характеру вхідного впливу і режиму вимірювань, виділяють кілька видів помилок.
Статична помилка визначається після загасання всіх перехідних процесів в системі при постійній величині задає впливу. [3]
Передаточна функція по помилці
W[osh]:=collect(simplify(1-K1),p);

сигнал помилки
Delta[U]:=collect(simplify(Uz/p*W[osh]),p);

Вихідний сигнал
Omega:=Uz/p*K1;
![]()
Статична помилка
> St:=Limit(p*Delta[U],p=0);

Підставивши числа отримаємо
> St:=limit(p*Delta[U],p=0);
![]()
Так як статична помилка не дорівнює нулю, то система буде статичною.
Omega:=Omega;Delta[U]:=Delta[U];
![]()
![]()
Перейдемо в часову область за допомогою перетворення Лапласа
Omega:=simplify(invlaplace(Omega,p,t));
Delta[U]:=simplify(invlaplace(Delta[U],p,t));

Побудуємо перехідну характеристику сигнала по помилці
plot(Delta[U],t=0..2);
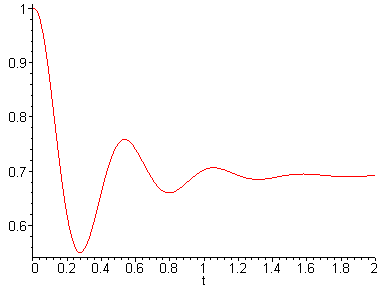
Рис 13 – Перехідна характеристика системи помилки
Динамічна помилка
![]()
Delta[din]:=int((Omega-0.3083)^2,t=0..infinity);
![]()
6 Висновок
При виконанні даної курсової работи була вивчена система регулювання швидкості обертання електродвигуна постійного струму, а саме принцип дії системи та призначення окремих елементів. В результаті аналізу системи були складені структурні схеми замкненої та розімкненої системи, знайдені передаточні функції, а також диференційні та статичні рівняння.
Також система регулювання швидкості обертання електродвигуна постійного струму була досліджена на стійкість двома способами. Як і очікувалось, система виявилася стійка. Також я визначала запас стійкості системи, і можу сказати що запас хороший як по фазі так і по амплітуді.
При побудові перехідної характеристики, ми розраховували ряд основних параметрів по графіку. З отриманих результатів можна зробити ряд висновків. На мою думку, значення перерегулювання в 45% високе, а от час регулювання нормальний, якщо звернути увагу на те, що в систему входять механічні конструкції. Кількість коливань, при яких встановлюється постійне значення становить N=3, це я вважаю не поганим результатом.
Розрахована статична помилка не дорівнює нулю, а отже дана система є статичною. А от динамічна помилка для такої системи невелика.
Таку схему можна використовувати на практиці в пристроях, в яких необхідно підтримувати постійну швидкість обертання певних механізмів.
Під час виконання курсової роботи я повторила знання, отримані на лекційних та практичних заняттях з ТАУ, та отримала гарний досвід у дослідженні систем.
В результаті виконання виникали лише труднощі по ліквідації помилок викликаних неуважністю. Сподіваюсь, що виявила і виправила всі помилки. Курсова робота виконана в повному обсязі і, на мою думку, вірно. Сподіваюсь, Ваша думка співпадає з моєю.