

31.05.2011Г. Лекция.
Продолжение. ТКС.
Особенность ТКС наличие двух гироагрегатов. Они дублируют друг друга и служат за контролем точности показаний. Используется тот, который точнее. В системе используется задатчик курса и ДИСС.
Системы автоматизированного управления вс.
К системам автоматизирования ВС относятся автопилоты и авиационные комплексы.
Все автоматические системы можно разделить на 2 больших класса:
Незамкнутая система управления без обратной связи.
Замкнутая система управления с наличием обратной связи.
Незамкнутые системы управления – простейшие системы управления. Полуавтоматические – когда воздействием системы является человек, а автоматическая – источник воздействия на систему является изменение каких-либо внешних условий в которых работает данная система.
Замкнутая система управления – характерной особенностью этой системы является наличие обратной связи, блягодаря которой информация о состоянии управляемого объекта передается на управляющие устройства.
Различие этих двух систем состоит в наличии обратной связи, которая позволяет контролировать и стабилизировать какой-либо параметр.
Автоматическое управление летательным аппаратом – процесс программного изменения и стабилизации отдельных параметров движения ВС или целенаправленного управления траекторией полета, осуществляемый с помощью средств автоматики без воздействия летчика на органы управления. Автопилоты предназначены для автоматической стабилизации самолета по траектории и дистанционного управления его положения в пространстве. Для достижения этих целей должен быть реализован некоторый контур автоматического регулирования параметра.
Функциональная схема автопилота.
Автопилот имеет три идентичных канала управления, которые отличаются друг от друга лишь типами используемых датчиков и структурой управляющих сигналов. Сервопривод каждого канала состоит из мостовой схемы (МОСТ), усилителя (У), дискриминатора, сервоусилителя (УМ) и рулевой машины (РМ). Параметры управления вырабатываются в виде сигналов рассогласования, в потенциометрических мостовых схемах, далее сигналы усиливаются, сравниваются и поступают в виде команд на рулевые машины. Рулевые машины управляет режимом отклонения рулевых поверхностей, которые возвращают самолет в исходное положение.
Автопилоты выполняют следующие функции:
Стабилизирует самолет на траектории полета относительно трех осей.
Автоматически выдерживают ортодромический курс.
Выполняют координированные развороты.
Выполняют необходимые эволюции самолета при дистанционном управлении с пульта.
Включение автопилота не требует предварительной настройки и может производиться при любом курсе и на любых положениях ВС в воздухе.
Выключение автопилота производится:
Вручную.
Автоматически, при отклонении параметров или отказа системы одной из систем автопилота.
Путем пересиливания рулевых машин штурвалом или педалями.
1.06.2011Г. Лекция.
Автоматизация процессов управления полетами.
Автоматизация обеспечивает высокий уровень безопасности полетов. Управление ВС принято разделять на:
Штурвальное (ручное).
Директорное.
Автоматическое.
Директорная или полуавтоматическая система обеспечивает сбор и анализ информации и выдает пилоту команду на управление ВС, то есть по сути дела управление ручное, а информация подается автоматически.
Аналоговые автоматизированные бортовые системы управления полетом.
Упрощенная структурная схема ПНК 154.
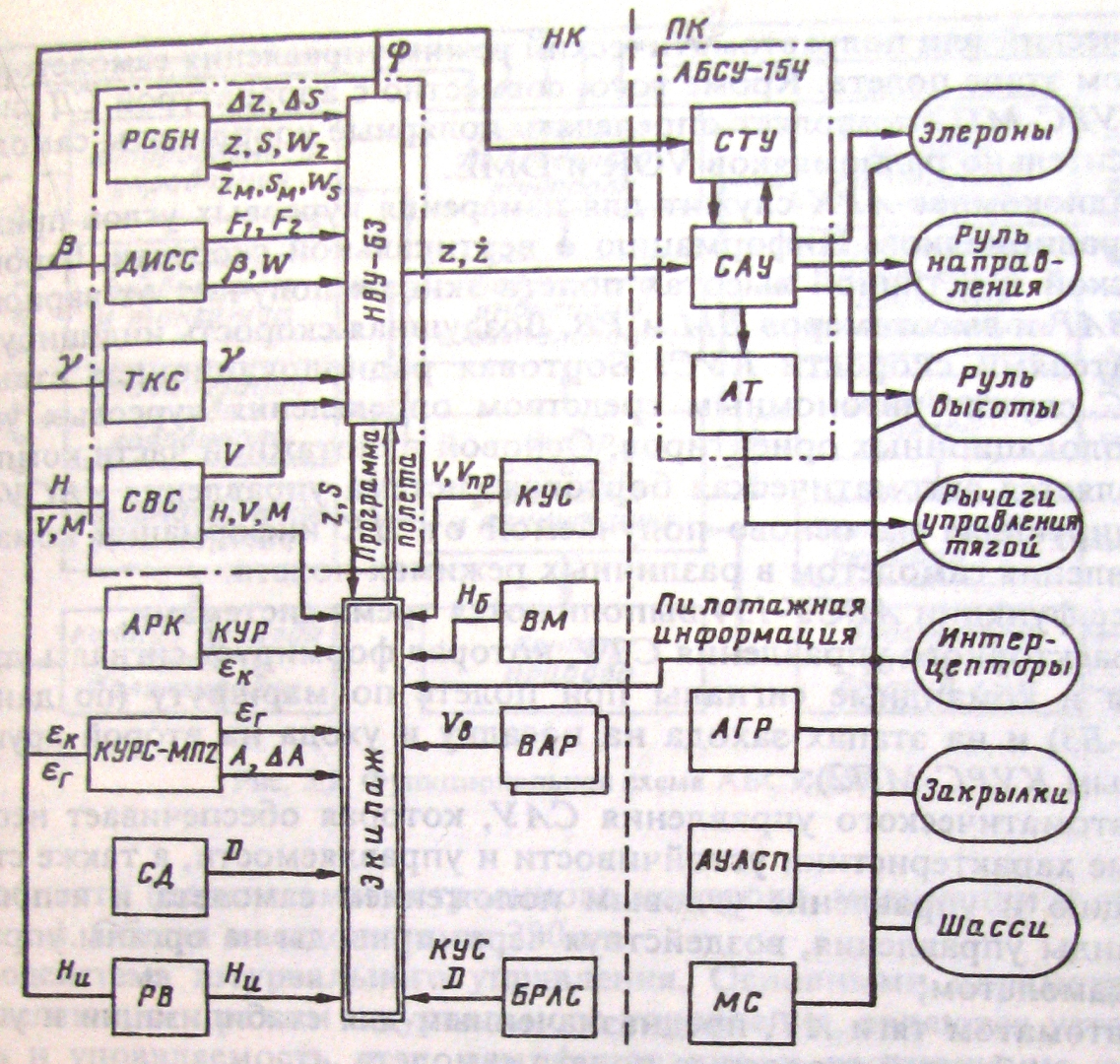
РСБН – Радиолокационная система ближней навигации.
ДИСС – Доплеровский измеритель угла сноса и путевой скорости.
ТКС – Точная курсовая система.
СВС – Система воздушных сигналов.
НВУ – Навигационный вычислитель.
АРК – Автоматический радиокомпас.
КУРС – Навигационно-посадочная система.
СД – Счетчик дальности.
РВ – Радиовысотомер.
КУС – Комбинированный указатель скорости.
ВМ – Барометрический высотомер.
ВАР – Вариометр.
БРЛС – Бортовая радиолокационная станция.
АБСУ – Автоматическая бортовая система управления.
СТУ – Система траекторного управления.
САУ – Система автоматического управления.
АТ – Автомат тяги.
АГР – Авиагоризонт.
АУАСП – Указатель перегрузки углов атаки.
МС – Указатель числа «М».
Пилотажно-навигационный комплекс – совокупность вычислителя датчиков и систем отображения информации для формирования и исполнения команд управления самолетом. ПНК обеспечивает:
Автоматическое и директорное управление самолетом на маршруте.
При заходе на посадку.
Устойчивость и управляемость самолета с системой автоматического управления тяги двигателя.
Устройство ПНК. Основой пилотажной части комплекса является АБСУ, формирующее команды управления самолетом. В АБСУ входит три системы: СТУ – которая управляет маршрутом заходом на посадку и ухода на второй круг, САУ – обеспечивает устойчивость и управляемость и стабилизацию угловых положений самолета, АТ – предназначен для стабилизации приборной скорости полета. В АБСУ входят также приборы и системы, контролирующие пилотажный режим самолета.
Функциональные системы управления ПНК.
Подсистема штурвального управления. Подсистема обеспечивает устойчивость и управляемость, демпфирование, соотношение между отклонениями штурвала, педалей и отклонения соответствующих управляющих поверхностей.
Подсистема автоматической балансировки самолета в вертикальной плоскости.
Подсистема угловой стабилизации в канале крена, тангажа и руля направления.
Подсистема управления разворотом и тангажом. Выполняет довороты на заданный курс и развороты.
Подсистема стабилизации параметра движения на траектории высоты, скорости числа «М» и бокового отклонения.
Подсистема управления заходом на посадку. Подсистема обеспечивает заход на посадку по второй категории ИКАО.
Подсистема управления тягой двигателя обеспечивает высокую точность стабилизации скорости планирования и заходе на посадку.
Подсистема ухода на второй круг. Режим ухода на второй круг начинается с высоты принятия решения и заканчивается высотой круга.
Подсистема индикации и сигнализации. Подсистема имеет: два прибора (пилотажно-командный прибор и пилотажно-навигационный прибор), рулевые индикаторы, а также световые табло сигнализации неисправности и кнопки-лампы.