12. Дпт с пв. Устр-во, схема, особ-сти, рег-ние, прим-ние.
ОВ ДПТ ПВ распол-ся на глав-х полюсах и вкл-ся пос-но с якорем. Сеч-е провода обмотки рассчитано на бол-е токи iя. При измен-и Iя (в рез-те возмущ-й, нагрузки или упр-я) изм-ся магн-й поток, что приводит к появл-ю вихр-х токов в полюсах и станине, кот-е создают свое МП, оказ-щее влияние на магн-е состояние машины. Вихревые токи возникают при возникн-и ∆Iя (динамика). Влияние вихр-х токов учит-т вводя эквив-й коротко-замкнутый контур с числом витков wвт. Матем-ски описать ЭД можно системой уравнений:
 ;
;
 ;
;
 ;
;
 .
Поток опр-ся результир-щим действием
iя
и вихр-х токов iвт
по кривой намагничивания. Ф = L*I.
.
Поток опр-ся результир-щим действием
iя
и вихр-х токов iвт
по кривой намагничивания. Ф = L*I.
Твт
– суммарная пост-я вр цепи возб-я, т.е.
вихр-е токи ув-т инерционность. При
линеаризации сист в окрест-стях точки
статич-го р-ма получили выраж-е линеариз-й
модели ДПТ ПВ: ∆M(p)*(1+pTэ)
= βэ*[∆ (p)-∆w(p)],
(2)
(p)-∆w(p)],
(2)
Где
 .
.
 - по кривой намагнич-я,
- по кривой намагнич-я,
 – эквив-я жесткость (жест. статич-й
линеариз-й х-ки).
– эквив-я жесткость (жест. статич-й
линеариз-й х-ки).
 Тэ
– эквив-я ЭМ-ная пост-я вр.
Тэ
– эквив-я ЭМ-ная пост-я вр.
 Структурная
схема в соотв-е с ур-м (2):
Структурная
схема в соотв-е с ур-м (2):
Ур-ния статики:


 (3)
(3)

Т.к.
 ,
тогда .
,
тогда .

Электромех-й м-нт:
 Т.о.
отличит-й спос-стью ДПТ ПВ то, что м-нт
пропорционален квадрату тока.
Т.о.
отличит-й спос-стью ДПТ ПВ то, что м-нт
пропорционален квадрату тока.
Жесткость переменная и сильно зав-т от нагрузки (или от скорости), при w→бесконечности, β→0 (т.е. мягкие х-ки), w асимптотически приближ-ся к оси ординат, но перейти во 2 квад-ранту не может, т.к. ЭДС не может превысить, следовательно, режим рекуперативного движения у ДПТ ПВ не м.б. реализован.
Ценные особенности ДПТ ПВ: 1) с ↓w электромагнитный M↑. Напр. Подъено-транспортное уст-во, кот. работает по з-ну пост-й мощ-сти.
Искусств-е х-ки получают включ-м добавочного сопр-ния в цепь якоря и шунтированием обмотки якоря. В наст. Вр для регул-я скорости исп-ся ШИМ.



13. Ад. Устр-во, разновидности, пр-п действия, схема замещ-я, уравн-я мех-й х-ки.
С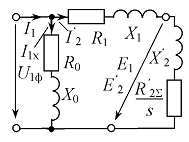 хема
замещения: R1,
Х1 — сопротивление статорной цепи; R’2,
X’2—
приведенное к статору сопротивление
роторной цепи; R0,
Х0 — сопротивление ветви намагничивания,
I1X
— ток Х.Х .
хема
замещения: R1,
Х1 — сопротивление статорной цепи; R’2,
X’2—
приведенное к статору сопротивление
роторной цепи; R0,
Х0 — сопротивление ветви намагничивания,
I1X
— ток Х.Х .
Из схемы получаем выр-е:


m1
- кол-во фаз (в данном случае 3).
 – скор. МП.
– скор. МП.
Из
сх замещ-я найдем
 по з-ну Ома (ветвью R0,
X0
м пренебречь, т.к. ток Х.Х
по з-ну Ома (ветвью R0,
X0
м пренебречь, т.к. ток Х.Х



-
(1) ур-ние мех-й х-ки. Где
 Задаваясь S,
м. постр S(М),
выражая w
ч/з S
м построить w(S).
Задаваясь S,
м. постр S(М),
выражая w
ч/з S
м построить w(S).
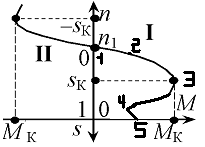
Мех-я х-ка приведена на рисунке. 1) ХХ (w0,0), 2) номин-й (wном, Мном); 3) максим-й м-нт (wmax, Mmax) – опр-т критич-ю нагрузку, 4) миним-й м-нт, 5) К.З. (пусковой). Х-ка имеет экстремум Мк, Sк для опр-я этих пар-тров берем проивод-ю dM/dS=0. Тогда:

 Подставив
Sк
в М=f(S),
получим:
Подставив
Sк
в М=f(S),
получим:

-
(2)
 - критич-я нагрузка, кот м преодолеть
АД, макс-й м-нт.
- критич-я нагрузка, кот м преодолеть
АД, макс-й м-нт.
Если Мс>Мк происходит опрокидывание ЭД (мен-ся знак произв-й) и остановка. Км=Мmax/Мном – перегрузочная спос-сть.
14. Режимы работы ад. Полная мех-я х-ка. Ф-ла Клосса.
П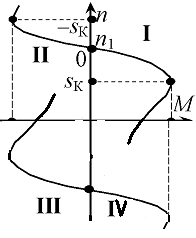 олная
мех-я х-ка АД. Квадранты: 1 – двигат-й
режим, 2 – генерат-й, 4 – противовкл-е.
олная
мех-я х-ка АД. Квадранты: 1 – двигат-й
режим, 2 – генерат-й, 4 – противовкл-е.
Уточненная ф-ла Клосса (предыдущий вопрос, когда при моделир-м дост-но иметь формализ-ю зав-сть, не содерж-щую конкр-х физ-х данных, то делим (1) на (2)):

a=R1/R’2, если они не известны, то условно м принять а=1,3. В приближ-х расчетах а = 0.
Упрощенная ф-ла Клосса:

-
(3). Жесткость мех-й х-ки:
 т.к.
т.к.
 ,
где
,
где
 – скорость МП, а w
– скорость Рт.
– скорость МП, а w
– скорость Рт.

В переходных режимах необходимо учесть влияние электромагнитной инерции:

где
 — постоянная времени инерции, второе
— постоянная времени инерции, второе
 — поправка. Дифференц-м (3):
— поправка. Дифференц-м (3):
 -
(4). При S<Sk,
-
(4). При S<Sk,
 <0,
если S>Sk,
>0,
- опрокидывание. От 0 до Sк
– рабочий.
<0,
если S>Sk,
>0,
- опрокидывание. От 0 до Sк
– рабочий.
15. Искусственные мех-е х-ки АД в различных режимах.
А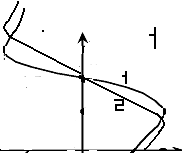 Д
с фазным ротором позв-ет менять пар-ры
ротора путем введения разл-х добавочных
сопр-ний (чаще активных). При этом
Ммах=Мкритич-й
Д
с фазным ротором позв-ет менять пар-ры
ротора путем введения разл-х добавочных
сопр-ний (чаще активных). При этом
Ммах=Мкритич-й
 ,
где 3 – число фаз. Мк=const
(R
не входит). А
,
где 3 – число фаз. Мк=const
(R
не входит). А
 и изменяется пропор-но R2.
и изменяется пропор-но R2.
1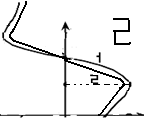 )
Рис 1 – введ-е
добавоч-го сопр-ния.
Мкр остается пост-ным, а Sкрит=R’2/Xk
и пропорц-но изменяется R2.
1 – естеств-я х-ка, 2 –искусств-я х-ка.
Преимущества: лучшие пуск-е св-ва. Реостат
огранич-т пусковые токи и ув-т М пусковой.
Жесткость х-ки (чувст-сть к нагрузке) с
ув-нием Rдоб
ум-ся. М. применять для регулир-я скорости,
но сущ-но сниж-ся КПД. Привлекает
простотой.
)
Рис 1 – введ-е
добавоч-го сопр-ния.
Мкр остается пост-ным, а Sкрит=R’2/Xk
и пропорц-но изменяется R2.
1 – естеств-я х-ка, 2 –искусств-я х-ка.
Преимущества: лучшие пуск-е св-ва. Реостат
огранич-т пусковые токи и ув-т М пусковой.
Жесткость х-ки (чувст-сть к нагрузке) с
ув-нием Rдоб
ум-ся. М. применять для регулир-я скорости,
но сущ-но сниж-ся КПД. Привлекает
простотой.
2) Введение в цепь Рт индуктив-го сопр-ния (Х2 добав-е) (рис 2) приводит к ↓S критического и ↓М критического, поэтому данный метод применяют редко. Пуск-й м-нт ум-ся, КПД ув-ся, cos φ ум-ся (за счет введ-я доп-й идукт-сти). Прим-ся редко.
3)
введ-е емкостного сопр-ния
будет приводить к ↓ Xk
(индукт-е сопр-е КЗ АД) ( )→↑Мк
(↑ нагрузочная спос-сть) из-за сложной
реализации на практике не применяется.
)→↑Мк
(↑ нагрузочная спос-сть) из-за сложной
реализации на практике не применяется.
4)
введ-е Rдоб
в цепь статора.
 ,
,
 .
За счет включ-я реостата ув-ся R1.
По формулам м сделать вывод, что введение
Rдоб
↓S
критич-е и ↓М критич-й. (х-ки аналогичны
при введ-и Х2д). Прим-ся для огранич-я
пуск-х токов.
.
За счет включ-я реостата ув-ся R1.
По формулам м сделать вывод, что введение
Rдоб
↓S
критич-е и ↓М критич-й. (х-ки аналогичны
при введ-и Х2д). Прим-ся для огранич-я
пуск-х токов.
5) влияние питающего U и f. А) U-ние. Естеств-е U м.б. только ум-но в пределах раб-го участка мех-й х-ки.
 тогда
тогда

При f1=const ум-ние U1 приводит к ум-нию Ф. Т.к. в номин-м р-ме магн-я цепь насыщена, то повыш-е U приводит к быстрому возраст-ю тока намагничив-я и даже при ХХ I > Iном, и ЭД м. нагреваться этим током выше допустимой t-ры. U ув-ть нецелесообразно, мал-е ∆U приводит к большому ∆I. U при f1=const рассм-ся как вспом-е упр-щее возд-е при упр-нием ЭД ч/з поток.
Б) изм-е f. Приводит к изм-и скорости МП.
 – эл-я
скорость, если число пар полюсов =1, то
эл-я и мех-я скорость равны. Изм-е частоты
приводит к обратно пропорц-му изменению
магн-го потока при усл-и, что U1=const
(380В). Т.к. в номин-м р-ме машина насыщена
(естеств-я х-ка), то допускается изм-е
частоты только в сторону ув-ния.
– эл-я
скорость, если число пар полюсов =1, то
эл-я и мех-я скорость равны. Изм-е частоты
приводит к обратно пропорц-му изменению
магн-го потока при усл-и, что U1=const
(380В). Т.к. в номин-м р-ме машина насыщена
(естеств-я х-ка), то допускается изм-е
частоты только в сторону ув-ния.
Для сниж-я w необх ум-ть f < fном. Но при этом треб-ся ум-ть U настолько, чтобы Ф оставалось примерно одинаковым. Наск-ко надо изм-ть U при изм-и f – з-ны рег-ния. Напр. u/f=const. Они зав-т от вида нагрузки.
16. АД с фазным ротором. Устройство, схема, достоинства, х-ки, пуск, регулир-е скорости.
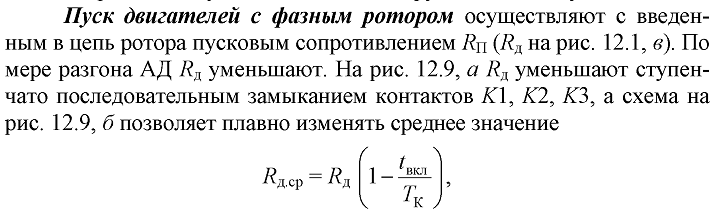
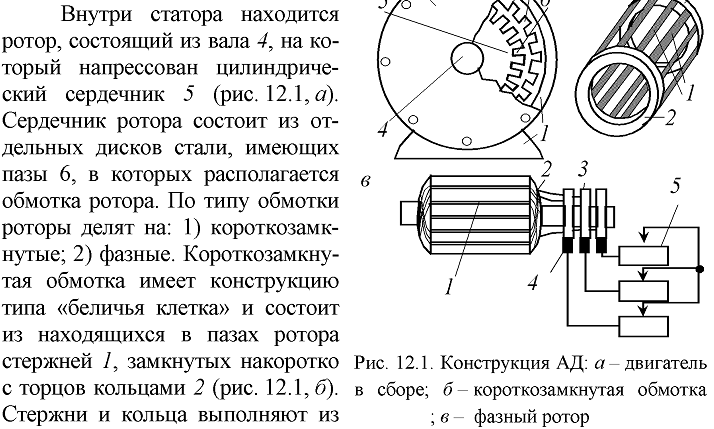
В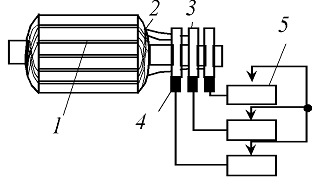
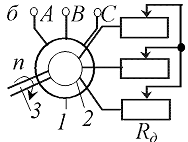 пазах 1 фазного ротора нах-ся трехфазная
обмотка 2, соединенная звездой. Ее концы
припаяны к изолир-м от вала кольцам 3, к
кот примыкают подпружин-е щетки 4. Щетки
и кольца образуют эл-е контакты, ч/з
кот-е к обмотке ротора подключается
3хфазный реостат 5. Реостат 5 м.б. пусковым
(для огранич-я пусковых токов ротора и
статора и ув-ния пуск-го м-нта АД),
регулировочным (для изменения частоты
вращения ротора) или пуско-регулировочным.
На 2й схеме приведена электрическая
схема.
пазах 1 фазного ротора нах-ся трехфазная
обмотка 2, соединенная звездой. Ее концы
припаяны к изолир-м от вала кольцам 3, к
кот примыкают подпружин-е щетки 4. Щетки
и кольца образуют эл-е контакты, ч/з
кот-е к обмотке ротора подключается
3хфазный реостат 5. Реостат 5 м.б. пусковым
(для огранич-я пусковых токов ротора и
статора и ув-ния пуск-го м-нта АД),
регулировочным (для изменения частоты
вращения ротора) или пуско-регулировочным.
На 2й схеме приведена электрическая
схема.