

27. Регул-й эп пост. Тока с ос по ск-ти и току с отсечкой.
С истема
РЭП с отрицательной обратной связью по
скорости и отсечкой по току представлена
на рисунке (1).
истема
РЭП с отрицательной обратной связью по
скорости и отсечкой по току представлена
на рисунке (1).
Рис 1
а) I < Iотс, Uдт< Uст VD. В раб-м диап-не тока справедливы выраж-я для предыд-го случая, т.к. раб-т только одна ОС по скорости (см. 2).
б) I > Iотс, Uдт> Uст VD. В этом диап-не тока одновр-но на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, кот-й стремится сделать скоростную х-ку более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получ-я требуемой х-ки должна преобладать ОС по току.
U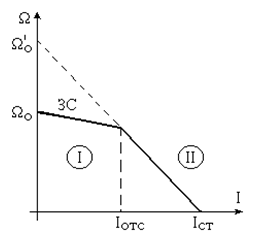 y
= (Uзс – Uдс – Uдт + Uст)крс;
y
= (Uзс – Uдс – Uдт + Uст)крс;
Еп = Uукп = Е + I(Ra + Rп);
Е = сеФн;
Uдс = кдс;
Uдт = I(Ra + Rп).
[Uзс – кдс – I(Ra + Rп) + Uст]крскп = сеФн + I(Ra + Rп);
= 0 – ;
 .
.
ОС по скор – осн-я ОС, обесп-т точн-сть. ОС по току – быстрод-е (Iя пропорц-н м-нту, т.е. тем самым мы упр-м м-нтом – усилием. Т.е. форм-м силовое возде на мех-ю сист, поэтому данная ОС будет форм-ть быстрод-е в перех-х р-мах).
Прим-ся в ЭП-х станков, пром-х роботов, экскаваторах.
Нелин-я ОС по току действ-т след-м обр.: пока Iя < Iотс, то Uот=0. Iя > Iотс ,то вводится в действие сильная ООС по току, в рез-те действия кот. мех-я х-ка становится очень мягкой. Uос, воздействуя ч/з рег-р ч/з преобр-ль, снижает U, в рез-те чего в-на Iя поддерж-ся на опр-м ур-не. При Ф=const это действие (огранич-е тока) равносильно огран-ю м-нта (усилия), прикладывается со стороны ЭД к мех-му. Мех-я х-ка сост-т из 2-х участков. На 1-м участке дейт-т только ООС по w и мех-я х-ка жесткая. При бол-х нагрузках сраб-т отсечка по I и действие привода по описанному выше. Привод с отсечкой по току м работать на жесткий упор при w=0.
28. Сау эПом с подчиненным регулированием координат. Выбор регуляторов и их настройка.
Эта с-ма реализует пр-п последов-й коррекции. Т.е. объект регул-я представ-ся в виде пос-но соед-ных звеньев, вых-ми пар-ми кот-х яв-ся корд-ты объекта, подлежащие контролю: I, U, E, Ф, M, ω, φ, полож-е. Для упр-ния каждой корд-й реализ-ся свой отд-й рег-р. Рег-р вместе с объектом с контрол-мой корд-ой образ-т контур с замкнутой ОС, рег-ры соед-ны посл-но так, что выход одного яв-ся входом другого. Замкнутые контуры образуют с-му вписанных др. в друга контуров.
1 -3
регулято-ры, 4-6 объект рег-я.
-3
регулято-ры, 4-6 объект рег-я.
Вых-й сиг-нал каждого внешнего кон-тура яв. задающим для пос-щего внутр-го, в рез-те вн-й контур подчинен соотв-щему внешнему. Преим-ва: упрощ-ся задача огран-я контрол-х координат, облегчается наладка, сокращ-ся сроки пуска объктов. Нед-ки: проигрыш по быстродей-ю.
Оптимиз-ю (настройку) сист нач-т с внутр-го контура. Оптимизир-в его перех-т к след-му и т.д. при перекъзоде к след-му контуру W подчин-го контура упрощают, аппроксим-в контур 1-го порядка. Новая нескомпенсир-я пост-я вр. выбирается с учитом желаемого быстрод-я внутр-го контура и датчиков ОС. След-й контур аналогично. Некоменс-я пост-я вр берется равной 2Тм, где Тм – пост-я вр пред-го контура. Быстрод-е внеш-го контура д.б. в 2 раза меньше, чем внутр-го.
Настройка PI-рег-ра на технический(модульный) оптимум:
При станд-й настройке контура тока пренебр-м внутр-й ОС по ЭДС. Это справедливо, если
 Объект
рег-ния упрощ-ся, контур тока сод-т
тирист-й пр-ль и цепь якоря.
Объект
рег-ния упрощ-ся, контур тока сод-т
тирист-й пр-ль и цепь якоря.
 Объект
сод-т одну бол-ю пост-ю вр Тя и малую
пост-ю вр
Объект
сод-т одну бол-ю пост-ю вр Тя и малую
пост-ю вр
 .
Задача рег-ра компенсация бол-й пост-й
вр объекта, а малую
- нецелесообразно компенсировать из
усл-я помехозащищ-сти и ее б наз-ть
некомпенсир-й. Применим ПИ-рег-р тока:
.
Задача рег-ра компенсация бол-й пост-й
вр объекта, а малую
- нецелесообразно компенсировать из
усл-я помехозащищ-сти и ее б наз-ть
некомпенсир-й. Применим ПИ-рег-р тока:
 Примем
Трт равным Тя с целью компенсации, тогда
W
разомкнутой системы.
Примем
Трт равным Тя с целью компенсации, тогда
W
разомкнутой системы.


Придадим формуле канонич-ю форму:
 -
контур тока.
-
контур тока.
 -
коэф-нт демпфир-я, от него зав-т х-р ПП-в.
-
коэф-нт демпфир-я, от него зав-т х-р ПП-в.
 – резонансная
частота.
– резонансная
частота.
Обычно
выбир-т
 ,
тогда ПП носят апер-й х-р. Если произв-е
проц-ы допускают некот-ю колеб-сть ПП-в
при неб-м перерег-нии, то
,
тогда ПП носят апер-й х-р. Если произв-е
проц-ы допускают некот-ю колеб-сть ПП-в
при неб-м перерег-нии, то
 выбир-т < 1, что приводит к улучш-ю
динамики (быстрод-е). При настройке на
тех-й оптимум
выбир-т < 1, что приводит к улучш-ю
динамики (быстрод-е). При настройке на
тех-й оптимум
 .
Тогда:
.
Тогда:
 ,
Трт = Тя.
,
Трт = Тя.
Н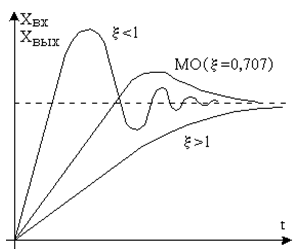 астройка
на МО является компромиссной. Быстрод-е
контура можно ув-ть, но вместе с тем
рас-тет перерег-ние, аналогично перерег-ние
можно ум-ть, но ум-ся и быстрод-е.
= 4,3% – перерег-ние;
астройка
на МО является компромиссной. Быстрод-е
контура можно ув-ть, но вместе с тем
рас-тет перерег-ние, аналогично перерег-ние
можно ум-ть, но ум-ся и быстрод-е.
= 4,3% – перерег-ние;
Н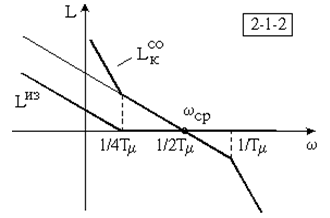 астройка
PI-рег-ра
на симметричный оптимум:
астройка
PI-рег-ра
на симметричный оптимум:
Пусть
W
оптимиз-го контура тока имеет вид:
 Тогда разом конт
Тогда разом конт
 (1)
(Wрс,
Wкт,
Wмех.часть
ЭД). При настройке на СО пар-ры выбир-т:
(1)
(Wрс,
Wкт,
Wмех.часть
ЭД). При настройке на СО пар-ры выбир-т:
Трс
= 8 ,
,
 (2)
(2)
Подставив (2) в (1):
 В
рез-те рег-р скомп-л бол-ю пост-ю вр Тм и
динамика контура опр-ся только малой
Wзамкнутого
контура скорости.
В
рез-те рег-р скомп-л бол-ю пост-ю вр Тм и
динамика контура опр-ся только малой
Wзамкнутого
контура скорости.

Наличие значит-х форсир-щих сост-щих в числителе приводит к появл-ю пика на частот-й х-ке. В обл. низких частот:
 Оптимиз-й
контур скорости м представить колеб-м
звеном с пост-й вр Т=
Оптимиз-й
контур скорости м представить колеб-м
звеном с пост-й вр Т= .
И коэф-нтом демпфир-я
.
И коэф-нтом демпфир-я

Наличие форсир-щего звена в W приводит к значит-му перерег-нию 43%. Вр. 1-го достиж-я максимума 0,1 , т.е. быстрод-е выше, чем при настройке на ТО. На практике перерег-ние ум-т до 8%, если на вх контура вкл-т апер-й фильтр с пост-й вр Тф = 8ч.
ЛАЧХ симметрична относ-но частоты среза – назв-е м-да.