5.. Граф-й анализ мех-х пп-сов при пуске и реверсе с акт-ной и реакт-ной нагрузками.
Пуск: ωнач=0 при t=0, Мдвиг скачком ↑-ся до М=М1. В этом случае ЭП переходит в режим равномерно ускоренного дв-я с ускорением ε=М1-Мс1/J∑
Достигнув требуемой ск-ти, момент двигателя переводится до значения М1=Мс1. Ускорение скачком ↓-ся до нуля, наступает статический режим при
ω= ωном.
Tпуска=
 Т.о.,
ПП изм-я ск-ти обеспечивается изм-ем
мом-та двигателя.
Т.о.,
ПП изм-я ск-ти обеспечивается изм-ем
мом-та двигателя.
П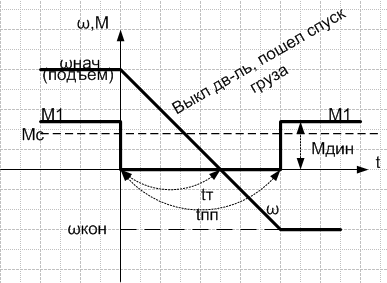 П
с активной нагрузкой Мс (акт-я нагрузка
– м. явл-ся ист-ком движ-я). Был подъем
груза – необх. сделать спуск. При
t=0 уст-вим МЭД=М1=0
(Uя=0)
привод замедляется с ускорением
П
с активной нагрузкой Мс (акт-я нагрузка
– м. явл-ся ист-ком движ-я). Был подъем
груза – необх. сделать спуск. При
t=0 уст-вим МЭД=М1=0
(Uя=0)
привод замедляется с ускорением
 =
=
 ,
а ск-ть ω
изм-ся по з-ну:
,
а ск-ть ω
изм-ся по з-ну:
ω= ωнач-(Мс/J∑)t, ч/з время tт= J∑ ωнач/Мс, под дей-м актив-го Мс (груз) ЭД-ль нач-ет ускоряться в противопол-м направлении с возрастающей ск-ю. Когда ω достигнет нужного знач-я tпп, М1=Мдв скачком увеличивают до М1=Мс и наступает статический режим ωкон=const.
Реверс при реактивной нагрузке – меняется знак Мс при изм-ии знака ω. Пусть при t=0, момент ЭД-ля скачком изм-ся до (–М1), тогда ω изм-ся (ЭП тормозится).
ω=ωНАЧ-(М1+Мс/J∑)t=ωнач-εЕ.; tт=J∑(-ωнач)/(-М1-Мс)=ωнач/εт(торможение).
П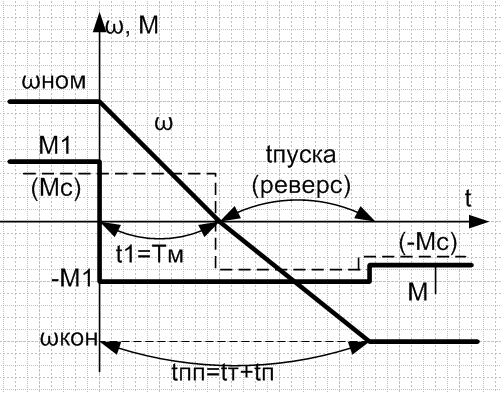 ри
t>t1, ω ЭД-ля под действием Мдвиг; М=-М1,
реактив. нагрузки на –Мс1. Мдин резко
уменьшается.εт=-М1-Мс/J∑; εп= - М-Мс/J∑; εт>
εп. ω=- М1-Мс/J∑*t – линейный з-н изменения
ск-ти. Закон изменения скорости в ПП
опред-ся хар-м изменения во времени
момента двигателя.
ри
t>t1, ω ЭД-ля под действием Мдвиг; М=-М1,
реактив. нагрузки на –Мс1. Мдин резко
уменьшается.εт=-М1-Мс/J∑; εп= - М-Мс/J∑; εт>
εп. ω=- М1-Мс/J∑*t – линейный з-н изменения
ск-ти. Закон изменения скорости в ПП
опред-ся хар-м изменения во времени
момента двигателя.
6.. Дпт с нв. Схема, принцип работы, статич-е хар-ки.
ДПТ исп-ся в ЭПе механизмов, требующих по технол-м усл-ям регулир-я скорости в широком диапазоне. При этом ЭД-ли со смешанным и пос-ным возбужд-ем, как правило, применяются в разомкнутых сист-х тягового ЭПа. ЭД-ли с независ-м возбужд-м в наст-е время явл-ся основой замкнутых систем рег-емого ЭПа.
ДПТ НВ имеет обмотку якоря и обмотку возбужд-я, которые в общем случае получают питание от независ-х ист-ков постоянного тока. Для процесса электромех-го преобр-я энергии необх. протекание переменных токов хотя бы по части обмоток машины. Вып-ние этого усл-я в машине пост-го тока обеспеч-ся работой коллектора, коммутирующего пост-й ток, поступающий в якорную обмотку со стороны ист-ка питания, с частотой эл, равной эл-ской скорости ротора.
М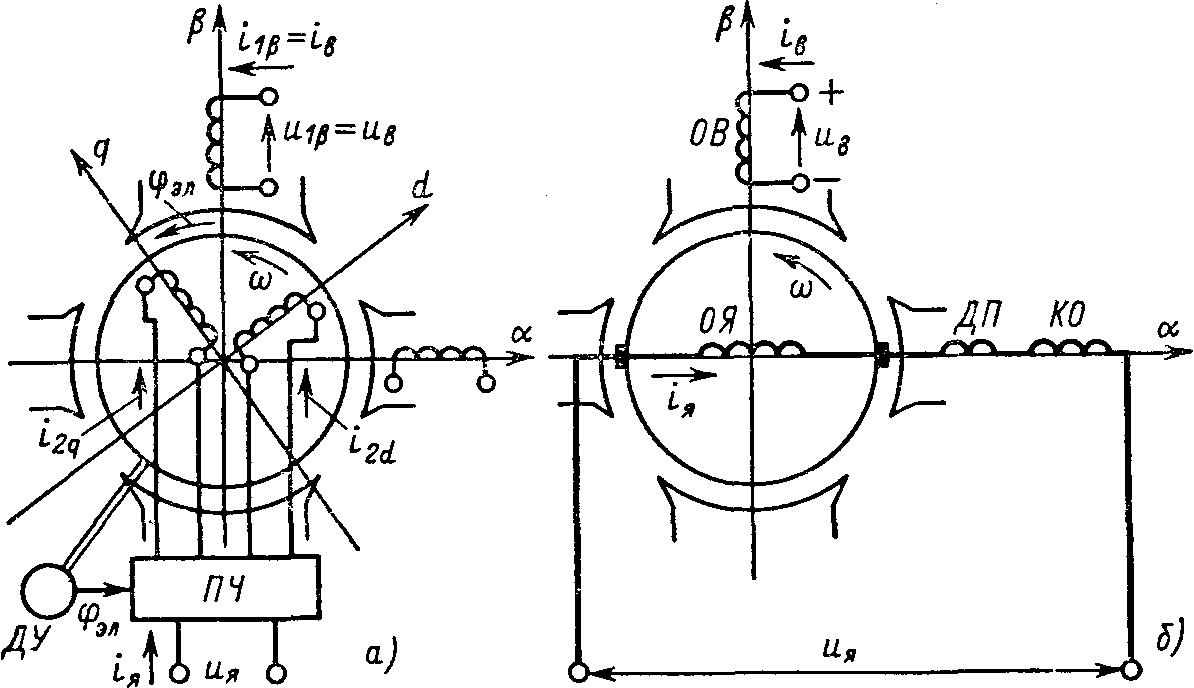 одели
ДПТ соотв-т включ-е обмоток 2хфазной
обобщенной машины по схеме, показанной
на рис. 3.1, а. Здесь обмотка Ст по оси
включена на пост-е напряж-е uв,
а обмотка по оси
пока не исп-ся. Обмотки фаз 2d
и 2q
ротора питаются переменными токами i2d
и i2q
от преобр-ля частоты ПЧ, осущ-щего
коммута-цию токов i2d
и i2q
в функции угла поворота ротора эл,
с частотой эл.
Если в кач-ве ПЧ исп-ся мех-ский коммутатор
— коллектор машины, то схема на рис.
3.1, а п/с модель ДПТ. В рассм-мой модели
МДС Ст созд-ся пост-ным током возбуждения
iв
= i1,
поэтому она ориентирована по оси
и неподвижна в пр-ве. Соотв-но и МДС Рт
при вращении Рт со скоростью
должна быть неподвижна относ-но Ст, а
это возм-о при усл-и, что МДС Рт вращ-ся
относ-но Рт против его вращ-я со скоростью
- .
Для вып-ния данного усл-я необх-о, чтобы
обмотки фаз ротора обтекались перем-ми
токами i2d
и i2q,
изменяющимися с частотой эл
по закону
одели
ДПТ соотв-т включ-е обмоток 2хфазной
обобщенной машины по схеме, показанной
на рис. 3.1, а. Здесь обмотка Ст по оси
включена на пост-е напряж-е uв,
а обмотка по оси
пока не исп-ся. Обмотки фаз 2d
и 2q
ротора питаются переменными токами i2d
и i2q
от преобр-ля частоты ПЧ, осущ-щего
коммута-цию токов i2d
и i2q
в функции угла поворота ротора эл,
с частотой эл.
Если в кач-ве ПЧ исп-ся мех-ский коммутатор
— коллектор машины, то схема на рис.
3.1, а п/с модель ДПТ. В рассм-мой модели
МДС Ст созд-ся пост-ным током возбуждения
iв
= i1,
поэтому она ориентирована по оси
и неподвижна в пр-ве. Соотв-но и МДС Рт
при вращении Рт со скоростью
должна быть неподвижна относ-но Ст, а
это возм-о при усл-и, что МДС Рт вращ-ся
относ-но Рт против его вращ-я со скоростью
- .
Для вып-ния данного усл-я необх-о, чтобы
обмотки фаз ротора обтекались перем-ми
токами i2d
и i2q,
изменяющимися с частотой эл
по закону


Рис. 3.1. Двухфазная модель двигателя постоянного тока
МДС Рт в этом случае будет вращаться относ-но Рт со скоростью - в соотве-и с выбранным черед-ем фаз, оставаясь неподв-й относ-но Ст. Т.к. поле неподвижно относ-но Ст, для получ-я мат-го описания динамич-х проц-в преобр-ния энергии в ДПТ целесообразно использовать преобразование , , d, q -> , (к = 0). Осуществим с помощью формул (2.16) преобразование токов i2d и i2q к осям , :

Следов-но, в осях , действительным перем-м токам обмотки Рт эквив-тна одна якорная обмотка, обтекаемая пост-ным током iя и создающая поле, неподв-е в пр-ве и направл-е по оси , совпадающей с осью щеток ЭД-ля. В реал-й машине по оси щеток напр-ны также МДС обмоток доп-ных полюсов ДП и компенсац-й обмотки КО, с учетом кот-х схема модели ДПТ с НВ в осях , представлена на рис. 3.1,б.
МДС
Iw=Ф.
Обмотка доп-го полюса ДП распол-ся вблизи
щеток, т.е. в зоне, где протек-т коммутации
(перекл-е секций обмоток якоря), ток в
этих секциях резко меняет напр-е.
Возникает возраст-щая ЭДС:
 (р-ция), кот. и выз-т сильное искрение под
щетками. Назнач-е ДП создать доп-й поток
Ф такого напр-я, чтобы в коммутир-й секции
возникла доп-я ЭДС, примерно =-я
(р-ция), кот. и выз-т сильное искрение под
щетками. Назнач-е ДП создать доп-й поток
Ф такого напр-я, чтобы в коммутир-й секции
возникла доп-я ЭДС, примерно =-я
 .
Тогда Ссум в секции б. прим. = 0 и коммутация
значительно улучшиться.
.
Тогда Ссум в секции б. прим. = 0 и коммутация
значительно улучшиться.
КО – явл-ся распред-й обмоткой, заклад-й в пазы на глав-х полюсах. Во вр. протек-я Iя по КО, созд-ся МДс компенсир-я МДС якоря, кот. оказ-т размагничив-е действие в машине. ОВ – обмотка возб-я, созд-т осн-й магн-й поток.
Ур-ние статич-х электромехй и мех-й х-к ДПТ НВ.
Мат/опис-е в статич-м р-ме из динамич-го при:
dM/dt=dIя/dt=0. Тогда:
 (1)
(1)
 (2)
(2)
M=К*Ф*Iя
При Ф=const – х-ка линейна. М построить по 2м точкам: 1) т. идеал-го Х.Х, Iя = 0, М = 0 (на оси ординат). 2) т. К.З (w = 0)
Когда
Iя
= 0, М = 0, тогда
 (3) – скорость ид-го Х.Х
(3) – скорость ид-го Х.Х
w
= 0 – К.З.
 (4) Rя
– меньше Ома, поэтому Iкз
намного больше I
ном (работа не допустима) или
(4) Rя
– меньше Ома, поэтому Iкз
намного больше I
ном (работа не допустима) или
 (5). Важный показ-ль
х-к – статич-я жесткость.
(5). Важный показ-ль
х-к – статич-я жесткость.
 т.к.
т.к.
 - берем произв-ю по dw
- берем произв-ю по dw
 ,
а
,
а
 ,
(7) с пом (3) и (7) мех-е х-ки м. представить
в разных формах:
,
(7) с пом (3) и (7) мех-е х-ки м. представить
в разных формах:
 (ордината=ctg
катет
(ордината=ctg
катет
 -
М/
-
М/ или
или

Электромех-я х-ка м.б. представлена не только в форме (1), но


Естеств-е мех-я и электромех-я х-ки: т.е. отсутст-т добавочные сопр-ния в якорной цепи и Uя=Uном, Ф=Фном (номин-е усл-я работы).