

Теорема Вариньона о моменте равнодействующей.
теорему Вариньона: момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
Рассмотрим систему
сил
![]() ,
,
![]() ,
…,
,
…,
![]() ,
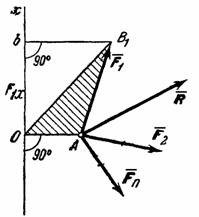
сходящихся в точке А .Возьмем произвольный
центр О и проведем через него ось Ох,
перпендикулярную к прямой ОА; положительное
направление оси Ох выбираем так, чтобы
знак проекции любой из сил на эту ось
совпадал со знаком ее момента относительно
центра О.
,
сходящихся в точке А .Возьмем произвольный
центр О и проведем через него ось Ох,
перпендикулярную к прямой ОА; положительное
направление оси Ох выбираем так, чтобы
знак проекции любой из сил на эту ось
совпадал со знаком ее момента относительно
центра О.
Для доказательства
теоремы найдем соответствующие
выражения моментов m0(
),
m0(
),
… . По формуле
![]() .
Но, как видно из рисунка,
.
Но, как видно из рисунка,
![]() ,
где F1x
- проекция силы
на ось Ох; следовательно
,
где F1x
- проекция силы
на ось Ох; следовательно
![]()
Аналогично вычисляются моменты всех других сил.
Обозначим
равнодействующую сил
,
,
…,
,
через
![]() ,
где
,
где
![]() .
Тогда, по теореме о проекции суммы сил
на ось, получим
.
Тогда, по теореме о проекции суммы сил
на ось, получим
![]() .
Умножая обе части этого равенства на
ОА, найдем:
.
Умножая обе части этого равенства на
ОА, найдем:
![]()
или,
.
![]()
Уравнения равновесия плоской произвольной, параллельной и сходящейся систем сил.
РАВНОВЕСИЕ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
Для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая, а следовательно, и главный вектор этих сил были равны нулю.
1. Геометрическое условие равновесия.
для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым.
2. Аналитические условия равновесия. Аналитически модуль главного вектора системы сил определяется формулой
![]()
R обратится в нуль только тогда, когда одновременно Rx=0, Ry=0, Rz=0, т. е., когда действующие на тело силы будут удовлетворять равенствам:
![]()
Если все действующие на тело сходящиеся силы лежат в одной плоскости, то они образуют плоскую систему сходящихся сил. В случае плоской системы сходящихся сил получим только два условия равновесия:
![]()
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Необходимые и достаточные условия равновесия любой системы сил даются равенствами R=0 и Mо=0.
1. Основная форма условий равновесия. Так как вектор R равен нулю, когда равны нулю его проекции Rx и Ry, то для равновесия должны выполняться равенства Rx=0, Ry=0 и Мо—0, где в данном случае Мо — алгебраический момент, а О — любая точка в плоскости действия сил. предыдущие равенства будут выполнены, когда действующие силы удовлетворяют условиям:
![]() (1)
(1)
Формулы 1 выражают: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
2*. Вторая форма условий равновесия: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно каких-нибудь двух центров А и В и сумма их проекций на ось Ох, не перпендикулярную прямой АВ, были равны нулю:
![]() 2
2
3*. Третья форма условий равновесия (уравнения трех моментов): для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно любых трех центров А, В и С, не лежащих на одной прямой, были равны нулю:
![]() 3
3
Равновесие плоской системы параллельных сил. В случае, когда все действующие на тело силы параллельны друг другу, можно направить ось Ох перпендикулярно силам. а ось Оу параллельно им . Тогда проекция каждой из сил на ось Ох будет равна нулю и первое из равенств 1 обратится в тождество вида 0=0. В результате для параллельных сил останется два условия равновесия:
![]()
где ось Оу параллельна силам.
Другая форма условий равновесия для параллельных сил, получающаяся из равенств 30), имеет вид:
![]()
При этом точки А и В не должны лежать на прямой, параллельной силам.
13.Уравнения равновесия пространственной произвольной, параллельной и сходящейся систем сил.
для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трех координатных осей были равны нулю.
РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ.
Необходимые и достаточные условия равновесия любой системы сил выражаются равенствами R=0, Mo=0 Но векторы R и Мо равны нулю только тогда, когда Rx=Ry=Rz=Q и Мх= =My=Mz=0, т.е. когда действующие силы будут удовлетворять условиям:
![]()
Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно этих осей были равны нулю .
Если на тело кроме сил действует еще пара, заданная ее моментом т, то при этом вид первых трех из условий 51) не изменится (сумма проекций сил пары на любую ось равна нулю), а последние три условия примут вид:
![]()
Случай параллельных сил. В случае, когда все действующие на тело силы параллельны друг другу, можно выбрать координатные оси так, что ось z будет параллельна силам Тогда проекции каждой из сил на оси х и у и их моменты относительно оси z будут равны нулю и система 51)
даст три условия равновесия:
![]()
Остальные равенства обратятся при этом в тождества вида 0=0.
Следовательно, для равновесия пространственной системы параллельных сил необходимо и достаточно, чтобы сумма проекций всех сил на ось, параллельную силам, и суммы их моментов относительно двух других координатных осей были равны нулю.
КИНЕМАТИКА