

7. Розрахунки електромеханічних характеристик двигуна і автоматизованого електропривода
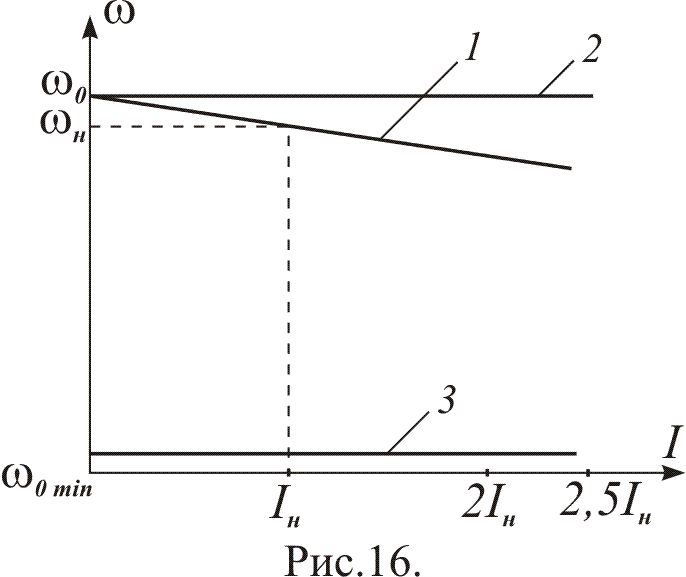
Електропривод постійного струму. Натуральна механічна характеристика двигуна постійного струму незалежного збудження описується рівнянням
![]() .
/82/
.
/82/
При
розрахунках частіше користуються
електромеханічною характеристикою,
яку одержують з /82/, підставивши
![]() :
:
![]() .
/83/
.
/83/
За формулою /83/ будують електромеханічну характеристику двигуна (рис.16, пряма 1).
 Електромеханічна
характе-ристика автоматизованого
електропривода залежить від його
структури.
Електромеханічна
характе-ристика автоматизованого
електропривода залежить від його
структури.
В регульованому електро-приводі живлення двигуна здійснюється від перетво-рювача електричної енергії (ПЕЕ). В якості ПЕЕ в електроприводі постійного струму використовують керо-вані випрямлячі (ВК) змінного струму у постійний на базі тиристорів чи транзисторів, а також перетворювачі з широтно-імпульсною модуляцією (ШІМ). В електроприводах змінного струму в якості ПЕЕ використовують частотні перетворювачі.
Згідно з завданням на проектування студент у своєму курсовому проекті описує вибраний вид ПЕЕ.
Керовані
перетворювачі.
В залежності від потужності двигуна
постійного струму вибирають різні схеми
випрямляння – від однофазних до
багатофазних. В електроприводах середньої
потуж-ності (до 30 кВт) використовують
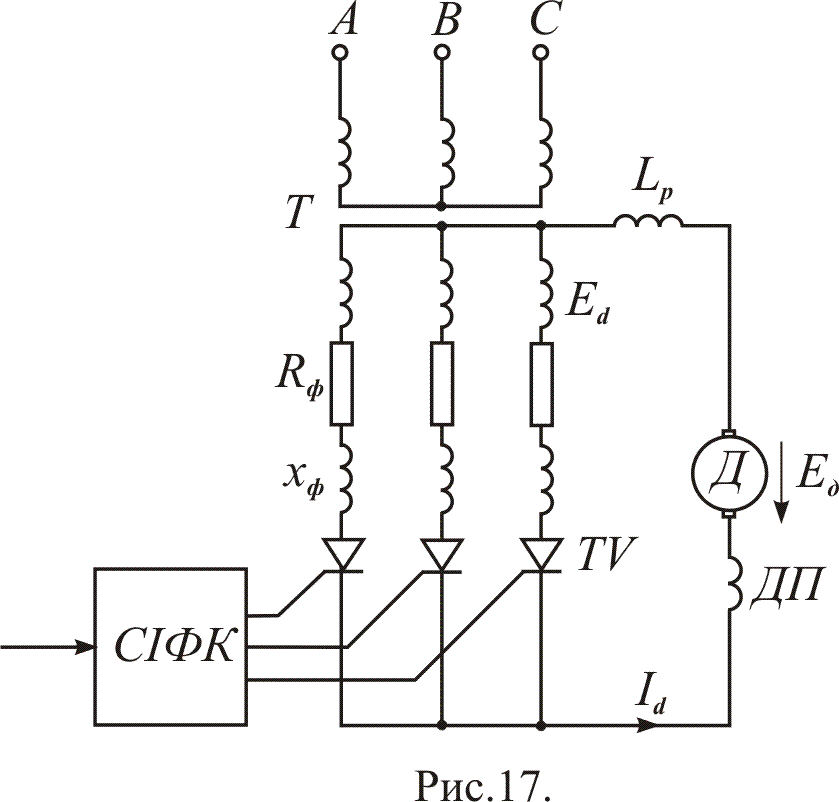
трифазну нульову схему. Наведена на
рис.17 така схема складається із
узгоджу-вального
трансформатора Т,
тиристорів TV
системи імпульсно-фазового керу-вання
(СІФК) і згладжуючого реактора
![]() .
.
 Основними
характеристик-ками перетворювача є:
характеристика керування
Основними
характеристик-ками перетворювача є:
характеристика керування
![]() і зовнішня характеристика
і зовнішня характеристика
![]() .
Властивості тиристорного
перетворювача
визначаються законом зміни ЕРС вторинної
обмотки трансформатора
.
Властивості тиристорного
перетворювача
визначаються законом зміни ЕРС вторинної
обмотки трансформатора
![]() при випрямленому струмі
при випрямленому струмі
![]() в залежності від вхідної величини, якою
є кут
керування
в залежності від вхідної величини, якою
є кут
керування
![]() .
.
У загальному випадку
![]() ,
,
де
![]() де
де
![]() діюче значення фазної ЕРС вторинної
обмотки трансформатора,
діюче значення фазної ЕРС вторинної
обмотки трансформатора,
![]() число фаз. Для трифазної нульової схеми
число фаз. Для трифазної нульової схеми
![]() .
Середній струм
.
Середній струм ![]() і типова потужність трансформатора
і типова потужність трансформатора
![]() .
.
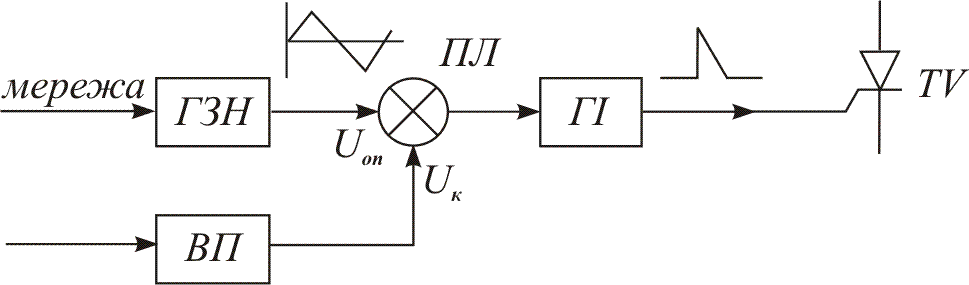
Рис.18.
В
даний час системи імпульсно-фазового
керування виготовляються з використанням
напівпровідникових елементів з
вертикальним принципом керування,
структурна схема якого показана на
рис.18. На вході генератора імпульсів ГІ
порівнюються опорна напруга
![]() (наприклад, пилкоподібна) генератора
змінної напруги ГЗН з напругою керування
(наприклад, пилкоподібна) генератора
змінної напруги ГЗН з напругою керування
![]() вхідного пристрою ВП. Напруга
залежить від режиму роботи двигуна,
тобто формується задаючою напругою і
напругою зворотних зв’язків. Формування
керуючого імпульсу ГІ відбувається в
момент зміни знаку різниці напруг
і
,
що здійснює порівняльна ланка ПЛ.
Зазвичай, число фаз ГЗН і ВП відповідає
числу фаз випрямляча.
вхідного пристрою ВП. Напруга
залежить від режиму роботи двигуна,
тобто формується задаючою напругою і
напругою зворотних зв’язків. Формування
керуючого імпульсу ГІ відбувається в
момент зміни знаку різниці напруг
і
,
що здійснює порівняльна ланка ПЛ.
Зазвичай, число фаз ГЗН і ВП відповідає
числу фаз випрямляча.
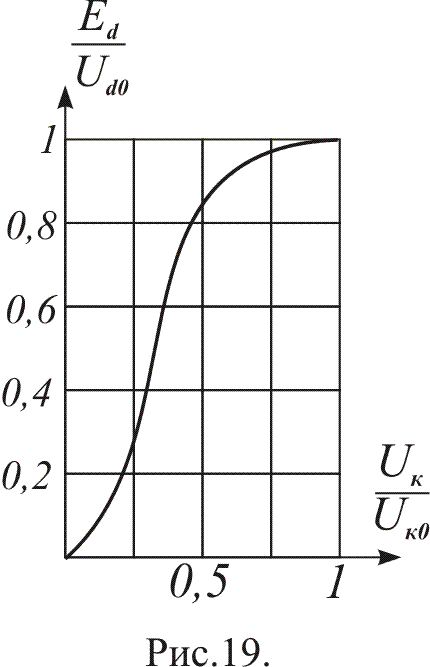 Характеристика
Характеристика
![]() є нелінійною і залежить від форми опорної
напруги. Тому з метою уніфікації
розрахунків систем автоматичного
регулювання замість характеристик
,
використовують характеристику
є нелінійною і залежить від форми опорної
напруги. Тому з метою уніфікації
розрахунків систем автоматичного
регулювання замість характеристик
,
використовують характеристику
![]() ,
яка у відносних одиницях наведена на
рис.19.
,
яка у відносних одиницях наведена на
рис.19.
При
живленні ВК кола якоря двигуна і кутах
комутації
![]() рівняння зовнішньої характеристики
має вид
рівняння зовнішньої характеристики
має вид
 /84/
/84/
де
![]() і
і
![]() відповідно зведені до вторинної обмотки
індуктивний опір розсіювання обмоток
фази трансформатора та їх активний
опір;
відповідно зведені до вторинної обмотки
індуктивний опір розсіювання обмоток
фази трансформатора та їх активний
опір;
![]() – падіння напруги на відкритому
тиристорі.
– падіння напруги на відкритому
тиристорі.
Напруга на якорі двигуна
![]() /85/
/85/
де
![]() еквівалентний опір керованого випрямляча;
еквівалентний опір керованого випрямляча;
![]() активний опір згладжуючого реактора.
активний опір згладжуючого реактора.
Індуктивний опір
![]() /86/
/86/
де
![]() напруга короткого замикання, яка для
трансформаторів серії ТС дорівнює 2 %,
напруга короткого замикання, яка для
трансформаторів серії ТС дорівнює 2 %,
![]() і
і
![]() відповідно номінальні фазні напруга і
струм первинної обмотки трансформатора,
відповідно номінальні фазні напруга і
струм первинної обмотки трансформатора,
![]() коефіцієнт трансформації.
коефіцієнт трансформації.
Активний опір фази
![]() ,
/87/
,
/87/
де
![]() потужність короткого замикання
трансформатора, яка залежить від його
потужності. Для трансформаторів серії
ТС дані
потужність короткого замикання
трансформатора, яка залежить від його
потужності. Для трансформаторів серії
ТС дані
![]() наведені в табл.3.
наведені в табл.3.
Таблиця 3
|
6,3 |
10 |
16 |
25 |
|
175 |
220 |
340 |
380 |
Щоби
напруга на якорі двигуна
![]() або
або
![]() ,
діюче значення напруги вторинної обмотки
трансформатора
,
діюче значення напруги вторинної обмотки
трансформатора
![]() відповідно повинно бути рівним 104 В чи
208 В.
відповідно повинно бути рівним 104 В чи
208 В.
За цією умови коефіцієнт трансформації
![]() .
/88/
.
/88/
Номінальний струм первинної обмотки
![]() ,
/89/
,
/89/
Широтно-імпульсні перетворювачі. Вони відносяться до імпульсних систем регулювання напруги постійного струму і забезпечують плавне регулювання кутової швидкості двигуна шляхом періодичного під’єднання якоря до джерела живлення і відмикання від нього. В період відмикання двигун продовжує обертатись за рахунок накопичених кінетичної і електромагнітної енергій.

Рис.20.
Схема
живлення двигуна постійного струму від
широтно-імпульсного перетворювача
показана на рис.20, а. Вона складається
з узгоджуючого трансформатора Т,
випрямляча В, зібраного за трифазною
нульовою схемою, транзистора VT
– електронного вимикача, згладжуючого
реактора
![]() і діода VД.
Діод VД,
шунтуючи коло якоря, утворює коло для
струму
і діода VД.
Діод VД,
шунтуючи коло якоря, утворює коло для
струму
![]() (рис.20, б) джерелом якого є ЕРС самоіндукції,
яка виникає в колі якоря в період
розімкненого стану електронного
вимикача. Це створює умови для безперервного
протікання струму
(рис.20, б) джерелом якого є ЕРС самоіндукції,
яка виникає в колі якоря в період
розімкненого стану електронного
вимикача. Це створює умови для безперервного
протікання струму
![]() ,
що значно зменшує його пульсацію і
запобігає виникненню комутаційних
перенапруг на транзисторі
,
що значно зменшує його пульсацію і
запобігає виникненню комутаційних
перенапруг на транзисторі
![]() та на обмотках якорного кола.
та на обмотках якорного кола.
Регулювання
напруги на якорі досягається змінною
тривалості імпульсів
![]() (широтно-імпульсна модуляція) при сталому
періоді комутації Т.
Середнє значення напруги
(широтно-імпульсна модуляція) при сталому
періоді комутації Т.
Середнє значення напруги
![]()
де
![]() стала випрямлена напруга;
стала випрямлена напруга;
![]() відносна тривалість імпульсу.
відносна тривалість імпульсу.
Рівняння електромеханічної характеристики
![]() ,
,
де
![]() середнє значення струму,
середнє значення струму,
![]() ,
показує, що змінюючи
,
можна регулювати швидкість в широкому
діапазоні. При цьому жорсткість
характеристики
,
показує, що змінюючи
,
можна регулювати швидкість в широкому
діапазоні. При цьому жорсткість
характеристики
![]() не змінюється, за умови неперервного
струму якоря. При невеликих струмах
запас електромагнітної енергії
не змінюється, за умови неперервного
струму якоря. При невеликих струмах
запас електромагнітної енергії
![]() малий, в період пауз струм якоря знижується
до нуля і в кривій струму з’являються
паузи – струм стає переривчастим, опір
якорного кола зростає і жорсткість
електромеханічної характеристики
зменшується. Це призводить до зменшення
діапазону регулювання швидкості.
малий, в період пауз струм якоря знижується
до нуля і в кривій струму з’являються
паузи – струм стає переривчастим, опір
якорного кола зростає і жорсткість
електромеханічної характеристики
зменшується. Це призводить до зменшення
діапазону регулювання швидкості.
Основним засобом зменшення зони переривчастих струмів є збільшення частоти комутації. Сучасні силові транзистори дозволяють здійснювати комутацію з частотою 2...10 кГц. Зменшенню зони переривчастих струмів сприяє згладжуючий реактор, збільшуючи ЕРС самоіндукції.
Для розширення діапазону регулювання швидкості використовують замкнені системи, в яких тривалість імпульсу змінюється в залежності від швидкості двигуна за допомогою зворотних зв’язків. При цьому можна використати вертикальний принцип керування за умови, що частота генератора змінної напруги буде рівною частоті комутації (ри.18).
Еквівалентний
опір широтно-імпульсного перетворювача
![]() розраховують за тими ж формулами, що і
еквівалентний опір керованого випрямляча.
розраховують за тими ж формулами, що і
еквівалентний опір керованого випрямляча.