

7.2.2. Система регулювання зі зворотним зв’язком за ерс і обмеженням струму якоря
Для обмеження струму якоря функціональну схему, наведену на рис.21, доповнюють давачем швидкості ДС (давач Хола), струмовою відсічкою (стабілітрон VД2) і обмеженням напруги на виході підсилювача П1 (стабілітрон VД1). (Рис.26).
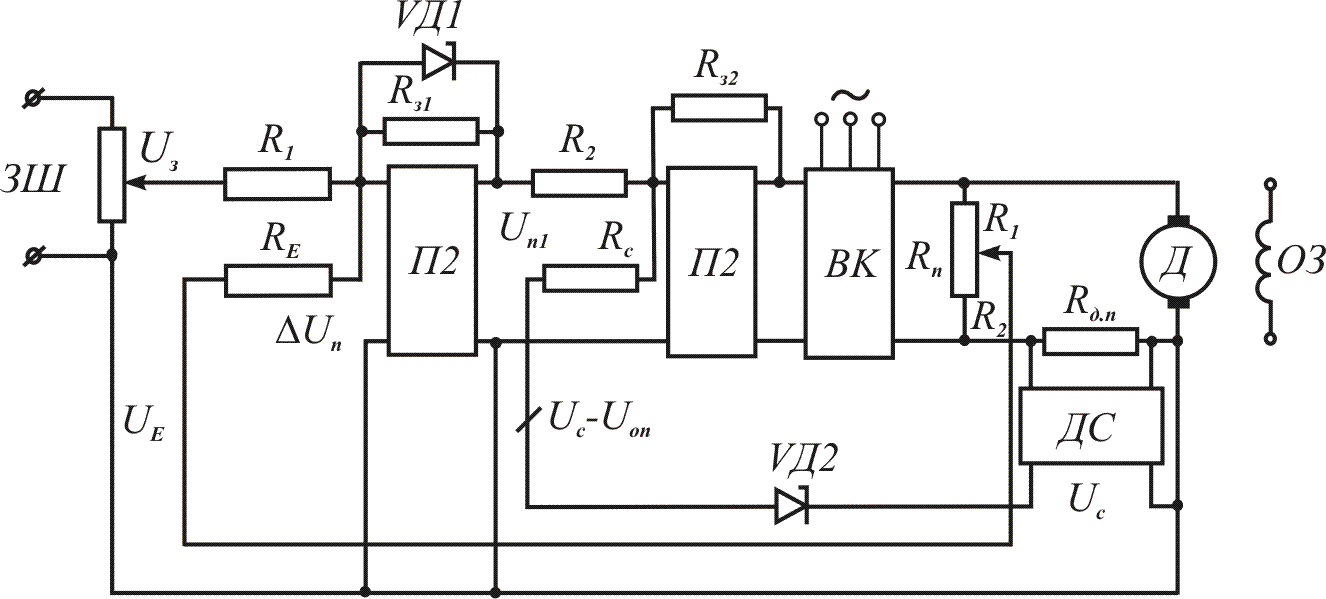
Рис.26.
При дії відсічки за
струмом і обмеженні напруги
![]() електромеханічна характеристика
двигуна, як і в системі зі зворотним
зв’язком за швидкістю, буде мати три
ділянки (рис.25). На ділянці 1
електромеханічна характеристика
двигуна, як і в системі зі зворотним
зв’язком за швидкістю, буде мати три
ділянки (рис.25). На ділянці 1
![]() описується рівнянням /100/. Підставивши
в нього
описується рівнянням /100/. Підставивши
в нього
![]() ,
обчислюють швидкість
,
при якій вступає в дію відсічка за
струмом. Зазвичай, приймають
,
обчислюють швидкість
,
при якій вступає в дію відсічка за
струмом. Зазвичай, приймають
![]() .
.
Щоб отримати рівняння характеристики на другій ділянці, необхідно два перші рівняння в /90/ замінити згідно рис.25 такими:
 /122/
/122/
де
![]() опорна напруга;
опорна напруга;
![]() коефіцієнт зворотного зв’язку за
струмом;
коефіцієнт зворотного зв’язку за
струмом;
![]() ,
,
![]() коефіцієнт підсилення першого і другого
підсилювачів.
коефіцієнт підсилення першого і другого
підсилювачів.
В проекті необхідно розв’язавши систему рівнянь /90/ з врахуванням /122/, щоб тримати рівняння електромеханічної характеристики на другій ділянці:
![]() .
/123/
.
/123/
В /123/ два
невідомі:
і
![]() .
Тому для обчислення
,
приймаємо, наприклад,
.
Тому для обчислення
,
приймаємо, наприклад,
![]() .
Тоді
.
Це дозволить зменшити
,
бо в /123/ маємо добуток
.
Тоді
.
Це дозволить зменшити
,
бо в /123/ маємо добуток
![]() .
За цією умови, підставивши в /123/
.
За цією умови, підставивши в /123/
![]() і
,
формула для розрахунку коефіцієнта
зворотного зв’язку за струмом буде
такою:
і
,
формула для розрахунку коефіцієнта
зворотного зв’язку за струмом буде
такою:
![]() .
/124/
.
/124/
Для зменшення
приймають
![]() .
.
За відомими
![]() ,
,
![]() і
і
![]() будують другу ділянку характеристики
.
будують другу ділянку характеристики
.
Зазвичай,
![]() .
Тому при швидкості
обмежують напругу на виході першого
підсилювача за допомогою стабілітрона
VД1. Швидкість
знаходять з /123/, підставивши
.
Тому при швидкості
обмежують напругу на виході першого
підсилювача за допомогою стабілітрона
VД1. Швидкість
знаходять з /123/, підставивши
![]() ,
наприклад,
,
наприклад,
![]() .
.
Напруга обмеження на виході підсилювача ПІ
![]() .
/125/
.
/125/
При
зворотний зв’язок за ЕРС не буде діяти,
система стане розімкненою, бо
![]() .
Рівняння електромеханічної характеристики
на третій ділянці
.
Рівняння електромеханічної характеристики
на третій ділянці
![]() .
/126/
.
/126/
Підставивши в /126/
![]() ,
одержимо вираз для обчислення величини
стопорного струму.
,
одержимо вираз для обчислення величини
стопорного струму.
Якщо , то розрахунки відповідають вимогам щодо обмеження струму. Коли , то необхідно зменшити за рахунок збільшення і знову вирахувати .
7.2.3. Система регулювання зі зворотним зв’язком за напругою і з обмеженням струму якоря
Для обмеження струму
якоря в системі регулювання за напругою
і струмом необхідно додатково ввести
затриманий від’ємний зв’язок за струмом
(стабілітрон VД2) і обмежити
напругу на виході першого підсилювача
(стабілітрон VД1), щоб
додатний зв’язок за струмом при
![]() не впливав на систему обмеження струму
(рис.27).
не впливав на систему обмеження струму
(рис.27).
При дії відсічки за
струмом і обмеженні напруги
електромеханічна характеристика буде
мати три ділянки (рис.25). На ділянці 1
характеристика описується рівнянням
/112/. Підставивши в /112/
![]() ,
обчислюють швидкість
,
при якій вступить в дію відсічка за
струмом. Зазвичай, приймають
,
обчислюють швидкість
,
при якій вступить в дію відсічка за
струмом. Зазвичай, приймають
![]() .
.
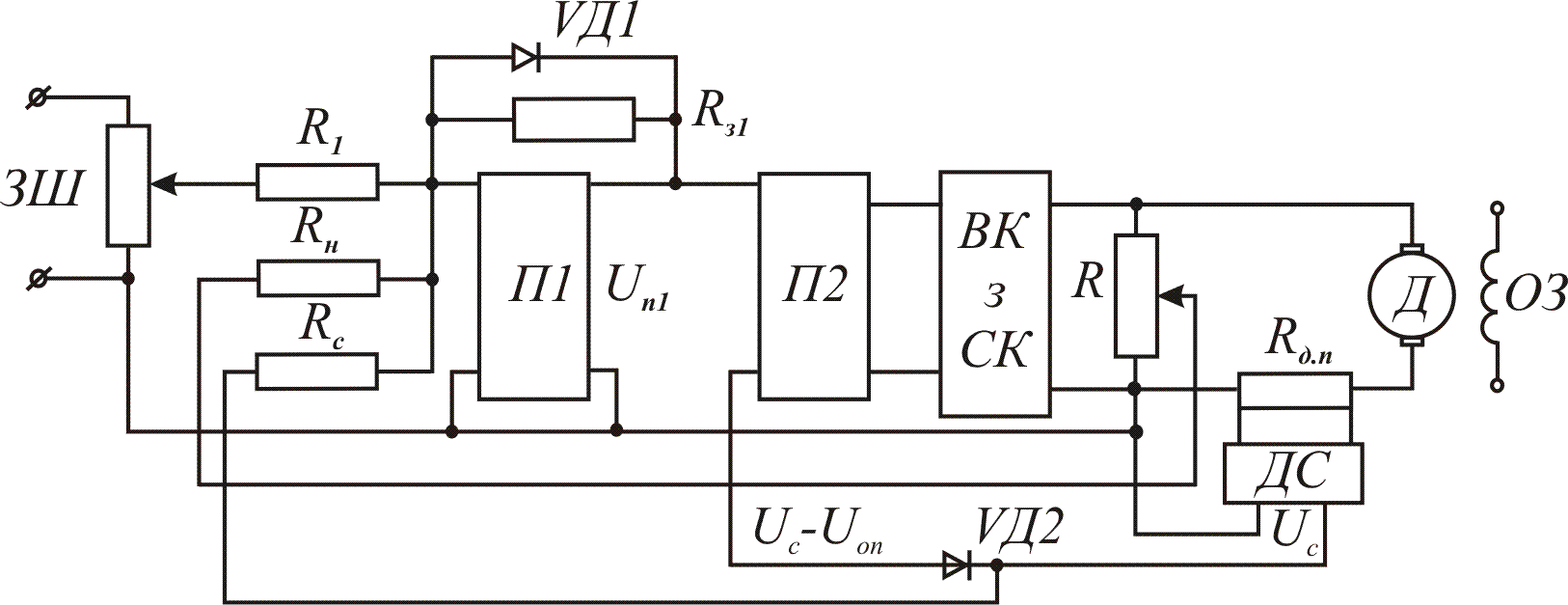
Рис.27.
Щоб одержати рівняння характеристики на другій ділянці, необхідно два перші рівняння в /90/ замінити такими:
 /127/
/127/
де
![]() опорна напруга;
опорна напруга;
![]() коефіцієнт від’ємного зворотного
зв’язку за струмом;
коефіцієнт від’ємного зворотного
зв’язку за струмом;
![]() коефіцієнти підсилення підсилювачів.
коефіцієнти підсилення підсилювачів.
В проекті необхідно розв’язати систему рівняння /90/ з врахуванням /127/ і отримати рівняння електромеханічної характеристики на другій ділянці:
![]() .
/128/
.
/128/
В /128/ два
невідомі:
![]() .
Тому для визначення
.
Тому для визначення
![]() приймемо
.
Тоді
і
приймемо
.
Тоді
і
![]() .
Це дозволить зменшити величину
,
бо в /128/ входить добуток
.
Це дозволить зменшити величину
,
бо в /128/ входить добуток
![]() .
За цієї умови, підставивши в /128/
.
За цієї умови, підставивши в /128/
![]() і
,
отримують вираз для обчислення коефіцієнта
зворотного зв’язку за струмом:
і
,
отримують вираз для обчислення коефіцієнта
зворотного зв’язку за струмом:
![]() /129/
/129/
Для зменшення
приймають
![]() .
.
За відомими
,
![]() і
будують другу ділянку характеристики
.
і
будують другу ділянку характеристики
.
Зазвичай,
![]() .
Тому при швидкості
обмежують напругу на виході першого
підсилювача. Швидкість
знаходять за /128/, підставивши
.
Тому при швидкості
обмежують напругу на виході першого
підсилювача. Швидкість
знаходять за /128/, підставивши
![]() .
.
Напруга обмеження на виході підсилювача ПІ
![]() .
/130/
.
/130/
За величиною
![]() підбирають стабілітрон VД1.
підбирають стабілітрон VД1.
При зворотний зв’язок за напругою не буде діяти, система стане розімкненою і електромеханічна характеристика буде описуватись таким рівнянням:
![]() .
/131/
.
/131/
Підставивши в /131/ , одержують вираз для обчислення величини стопорного струму .
При розрахунки виконані вірно.Коли , то можна зменшити за рахунок збільшення і знову визначити .