

6.4. Гальмові пристрої.
При зупинці рухливої системи апарата накоплена кінетична енергія переходить в удар, прийнятий сердечником електромагніта (при замиканні), упором (при розмиканні), або якимись іншими деталями. Ці удари приводять до посиленого зносу контактів (внаслідок дребезга), магнітної системи, усіх деталей рухливої системи. Внаслідок відбувається порушення роботи і руйнування всього апарата.
Для зм'якшення удару і його шкідливих наслідків багато електричних апаратів забезпечуються гальмовими пристроями. Задачею цих пристроїв є прийняти на себе удар і погасити всю накопичену кінетичну енергію рухливої системи чи частини її.
Розрізняють три види гальмових пристроїв: еластичні, буферні і заспокійливі.
Еластичні пристрої застосовуються в апаратах, що мають невеликий запас кінетичної енергії. Вони виконуються у виді еластичних упорів зі шкіри, картону, твердої гуми й інших матеріалів.
У могутніх апаратах застосовуються буферні пристрої, переважно гідравлічні. Гальмове зусилля в останніх створюється за рахунок опору витікання рідини через малі отвори.
Заспокійливі пристрої застосовуються головним чином у реле. Вони призначені не тільки для поглинання енергії удару, але і для уповільнення дії апарата.
При наявності гальмових пристроїв (Рт) рівняння (6.3) на ділянці гальмування прийме вид
![]() . (6.18)
. (6.18)
Якщо сила гальмування постійна, одержимо
![]() , (6.19)
, (6.19)
де v0 - швидкість рухливих частин у момент початку дії гальма t = 0, а t — час від початку дії гальма.
Шлях, пройдений з початку гальмування,
![]() . (6.20)
. (6.20)
Час від моменту початку дії гальма до повної зупинки рухливої системи tт визначиться з рівняння (6.19), якщо покласти v = 0,
![]() . (6.21)
. (6.21)
З рівняння (6.21) випливає, що для зупинки рухливих частин гальмовим пристроєм сила гальмування Pт повинна бути більше різниці сил, обумовлених тяговою і механічною характеристиками. І аналогічно при вимиканні, коли стискальне зусилля відсутнє, сила гальмування повинна перевищувати силу, обумовлену механічною характеристикою.
6.5. Поляризовані, магнітоелектричні, електродинамічні й індукційні системи.
6.5.1. Поляризаційні механізми.
Поляризовані електромагнітні системи відрізняються від розглянутих вище наявністю двох не залежних один від одного магнітних потоків: постійного, що не залежить від стану схеми, у яку включений механізм, і змінного, залежного від стану схеми, у яку включений механізм. Перший, поляризуючий, потік Фп створюється або постійним магнітом (мал. 6.7), або електромагнітом з незалежним живленням. Другий, робітник, потік Фэ створюється електромагнітом. Значення і напрямок робочого потоку залежать від стану схеми, у яку включений механізм.
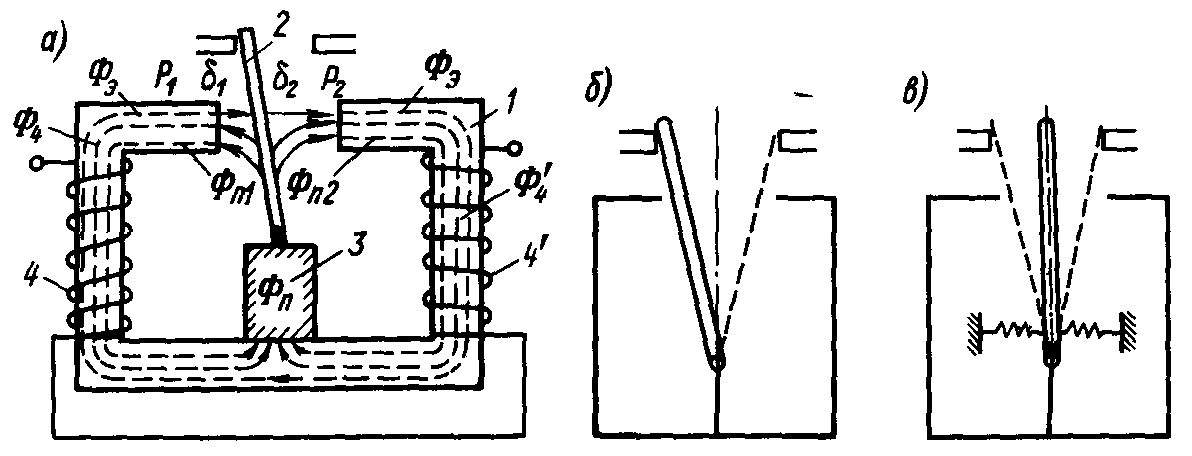
Рис. 6.7. Принцип пристрою поляризованої магнітної системи
Принцип дії. Утворений магнітом 3 поляризуючий потік Фп, пройшовши через якір 2, розгалужується. Одна його частина Фп1 проходить через зазор 1 і ліву частину сердечника 1. Друга його частина Фп2 проходить через зазор 2 і праву частину сердечника. Котушками 4 і 4', розміщеними на сердечниках і підключеними , створюється робочий потік. Основна його частина Фэ замикається через весь повітряний простір 1+2 і сердечник, охоплюючи обидві котушки. Менші частини цього потоку Ф4 і Ф4 замикаються через якір, що відповідають повітряному зазору і частині сердечника, охоплюючи тільки одну котушку.
При наявності тільки одного поляризуючого потоку якір відхилиться до одного з полюсів магніту, тому що зі зменшенням зазору (у нашому прикладі 1) частина поляризующего потоку в цьому зазорі збільшиться за рахунок зменшення його частки в іншому зазорі. З появою робочого потоку в одному з зазорів будемо мати різницю потоків, а в іншому - суму. У нашому прикладі в зазорі 1 - потік Фп1 - Фэ - Ф4, у зазорі 2 - потік Фп2 + Фэ + Ф4. В міру збільшення робочого потоку потік у зазорі 1 буде усе зменшуватися, а в зазорі 2 - збільшуватися. При якомусь співвідношенні потоків якір перекинеться на праву сторону, тобто система спрацює.
Для повернення системи у вихідне положення потрібно змінити полярність струму (а отже, і потоку) у робочих котушках. Можна настроїти систему так, що якір повернеться у вихідне положення при зниженні робочого потоку і збереженні його полярності. Для цього необхідно, щоб, перекинувшись вправо, якір не переходив через нейтральне положення (мал. 6.7,6), тобто щоб при будь-якім положенні якоря той самий повітряний зазор залишався менше іншого (наприклад, 1 < 2). Таке настроювання називається настроюванням на перевагу. У магнітній системі (мал. 6.7,в) якір у залежності від полярності струму в робочій котушці може відхилятися в ту чи іншу сторону. При знеструмленій котушці якір повернеться в нейтральне положення.
Розрахунок тягових сил. Вважаємо, що індукція розподілена в зазорах рівномірно, і розрахунок будемо вести, використовуючи формулу Максвелла. Сили, що діють на якір у зазорах 1 і 2 від усіх потоків, позначимо відповідно P1 і Р2.
При наявності тільки поляризующего потоку
![]() ;
;
![]() .
(6.22)
.
(6.22)
Сумарна сила, що діє на якір,
![]() . (6.23)
. (6.23)
З огляду на, що Фп1 + Фп2 = Фп, можемо написати
![]()
![]()
![]() (6.24)
(6.24)
Тоді
![]() , (6.25)
, (6.25)
тобто сумарна сила, що діє на якір, пропорційна зсуву якоря від нейтрального положення [(2 - 1/2 - зсув] і залежить від потоку постійного магніту.
При наявності робочого потоку
![]() ,
,
![]() . (6.26)
. (6.26)
Потоками Ф4 і Ф’4 можемо зневажити, тому що постійний магніт має для них великий опір і вони малі в порівнянні з іншими потоками. Тоді
![]() ,
,
![]() . (6.27)
. (6.27)
Нас цікавить значення потоку Фэ, при якому якір почне переміщуватися. Це буде за умови, коли Р1 = Р2, тобто
![]() (6.28)
(6.28)
відкіля
![]() (6.29)
(6.29)
Якщо зневажити втратами в сталі сердечника і потоками розсіювання, то мінімальна МДС Fmin, при якій якір прийде в рух, буде
![]() . (6.30)
. (6.30)
Підставляючи значення Фп1 і Фп2 згідно (6.24), одержимо
![]() , (6.31)
, (6.31)
тобто мінімальна МДС робочих котушок, необхідна для спрацьовування системи, пропорційна поляризуючому потоку і зсуву якоря від нейтрального положення.
Форми магнітних систем. По джерелу МДС поляризуючого поля чи розрізняють системи з постійним магнітом і системи з електромагнітом, що живлетьсяся від незалежного джерела.
По конструкції розрізняють системи з послідовним магнітним ланцюгом, з рівнобіжної, чи диференціальним, магнітним ланцюгом і з мостовим магнітним ланцюгом. У мостовому магнітному ланцюзі якір залишається в нейтральному положенні при відсутності струму в робочих обмотках.
Область застосування. Поляризовані системи знаходять широке застосування в установках проводовий зв'язку, а також у пристроях електросилової автоматики, релейного захисту, у системах, що стежать, системах телекерування, залізничної сигналізації і блокування. Особливостями цих систем є спрямованість дії, висока чутливість, велика кратність термічної стійкості, швидкодія.