

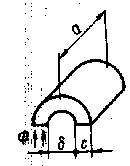
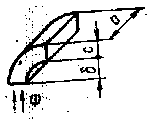
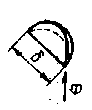
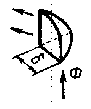
Тороїд змінного перетину.
Якщо вважати потік незмінним уздовж усієї довжини магнітопровода (мал. 5.6), то
![]() .
.
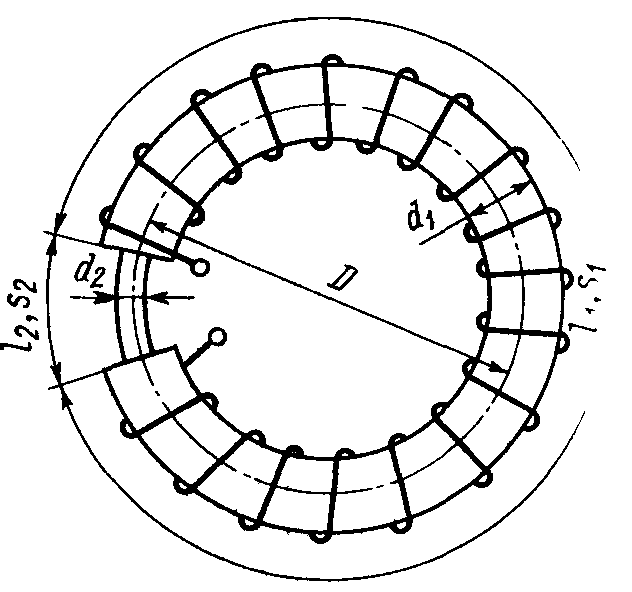
Рис. 5.6. Тороїд змінного перетину.
По заданому потоці знаходимо
![]() і
і
![]() ,
,
а по кривій намагнічування визначимо Н1 і Н2. Падіння магнітного потенціалу на ділянках l1 і l2 будуть H1l1 і H2l2.
Шукана м.р.с.
![]() .
.
Зворотна задача - визначення потоку Ф по заданій м.р.с. F - не може бути вирішена безпосередньо для розглянутого випадку. М.р.с. витрачається нерівномірно, тому що опір одиниці довжини на ділянках ланцюга різний.
Задачу вирішують методом послідовних наближень. Задаються значеннями потоків Ф1, Ф2 ... Фn і знаходять відповідні їм значення F1, F2 ... Fn . Будують криву Ф = f(F) (мал. 5.7). За заданим значенням Fз знаходять шуканий потік Фи.
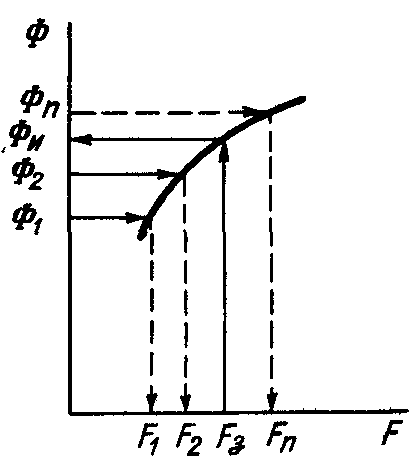
Рис. 5.7. До розрахунку магнітного ланцюга методом послідовних наближень.
Додаток 1. Розрахункові формули провідності окремих елементарних об’ємів і деяких видів магнітних полів.
|
|||
|
Ескіз |
Найменування об’єму |
Розрахункова формула |
1 |
2 |
3 |
4 |
1 |
|
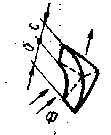
Призма |
|
2 |
|
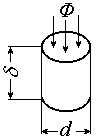
Циліндр |
|
3 |
|
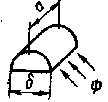
Половина суцільного циліндра |
|
4 |
|
Чверть суцільного циліндра |
|
5 |
|
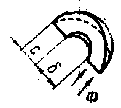
Половина порожнього циліндра |
При
>3c
при
<3c
|
6 |
|
Чверть порожнього циліндра |
При
>3c
При
<3c
|


 ;
;
 ;
;
№ п/п |
Ескіз |
Найменування об’єму |
Розрахункова формула |
||||
7 |
|
Суцільний сферичний квадрант |
|
|
|||
8 |
|
Половина суцільного сферичного квадранта (сферичний октант) |
|
|
|||
9 |
|
Квадрант сферичної, оболонки |
|
|
|||
10 |
|
Октант сферичної оболонки |
|
|
|||
11 |
|
Тіла обертання |
При
>3c
;
при
<3c
(для випадку циліндр - площина величина провідності збільшується в два рази) |
|
|||
12 |
|
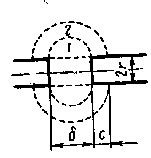
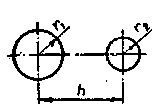
Паралельні циліндри |
де
для випадку r1=r2=r u=h/2r . |
|
|||
 ;
;
Тема 6 : Електромагнітні механізми
Механічна і тягова характеристики
апаратів.
Переміщенню якоря під дією сили, що розвивається електромагнітом апарата, перешкоджають сили опору. Сумарна сила опору складається з сил контактних пружин (замикаючих контактів), ваги рухливої системи апарата і сил тертя в рухливих деталях. При цьому напрямок сил, створюваних пружинами і вагою рухливої системи, незмінні а сили тертя змінюють напрямок при зміні напряму руху якоря.
Під тяговою (електромеханічної) характеристикою електромагніта розуміють залежність сили тяги (чи моменту), що розвивається якорем при заданих ампервитках котушки, що втягує, від величини повітряного зазору.
Статичні характеристики залежать від конструкції магнітопровода і ролі струму.
Механічні характеристики для прямоходових магнітних систем представляє залежність Ротр = f(), для систем з поворотним якорем - залежність Мотр= f().
При включенні електромагніта:
![]() ;
;
![]() .
.
При відключенні сили і моменти тертя змінюють знак:
![]() ;
;
.
Тут: Ротр і Мотр - протидіючі сили і моменти;
Рпр і Мпр - зусилля, створювані пружинами;
G - вага рухливої системи (знак залежить від конструкції);
МG - момент від ваги рухливої системи;
Ртр і Мтр - сили в момент тертя.
Механічна характеристика представляє ламану лінію (мал.22). При максимальному зазорі 1 діють сили тертя 1, вага рухливої магнітної системи 2 і сила пружини, що відключає, 3, що має попереднє стискання.
При русі якоря протидіюча сила Ротр плавно зростає за рахунок стискання пружини, що відключає. У момент зіткнення контактів при 2 протидіюча сила Ротр зростає стрибком, за рахунок попереднього стискання контактної пружини 4. При подальшому русі якоря Ротр плавно зростає за рахунок стиску вже двох пружин - що відключає і контактної. Ламана лінія 5 являє собою механічну
характеристику апарата й отримана підсумовуванням прямих 1 - 4. Нахил прямих 3 і 4 залежить від жорсткості пружин.
На цьому ж малюнку приведена крива 6, що представляє тягову характеристику апарата. Для того, щоб якір почав рух, необхідно, щоб електромеханічна сила була більшою протидіючих сил. Тому тягова характеристика 6 повинна лежати вище механічної характеристики 5.
При занадто великій різниці між тяговою і механічною характеристиками виходить велике надлишкове зусилля, а отже, великий приріст кінетичної енергії. У цьому випадку при зупинці рухливої системи кінетична енергія переходить в удар. А удари приводять до зносу апарата. Цю обставину необхідно враховувати при розрахунку характеристик. Крім того, для зм'якшення ударів застосовують гальмові пристрої. Еластичні пристрої виконуються у вигляді опорів зі шкіри, твердої гуми й інших матеріалів в апаратах з невеликим запасом кінетичної енергії.