

6.1. Статичні тягові характеристики електромагнітів і механічні характеристики апаратів.
Для утримуючих електромагнітів інтерес має тільки сила Р, створювана електромагнітом при незмінному (притягнутому) положенні деталі.
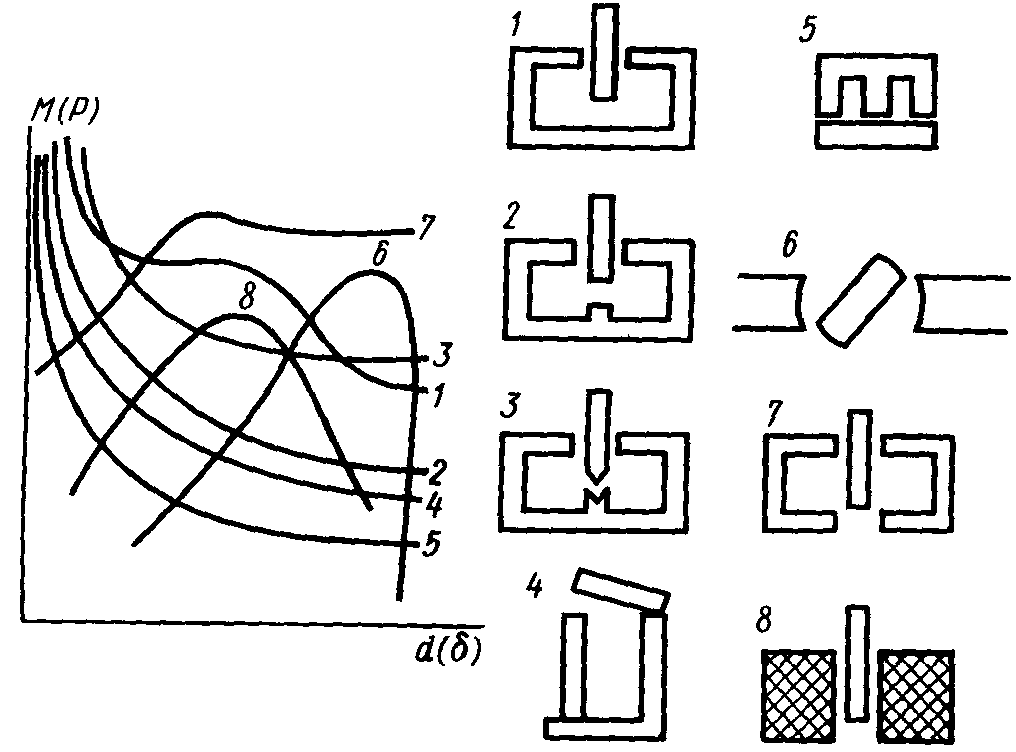
Рис. 6.1. Статичні тягові характеристики деяких електромагнітних систем: 1-8 - форми систем і відповідні їм характеристики.
Для електромагнітів, що притягують, нас цікавить залежність створюваного електромагнітом зусилля від робочого зазору Р = f() чи залежність моменту від кута повороту якоря М = f (), тому що для приведення в дію того чи іншого апарата необхідно перебороти його протидіючі сили (механічну характеристику), що змінюються по ходу якоря в різних апаратів по-різному. Приклади тягових характеристик деяких апаратів приведені: на мал. 6.1.
Під механічною характеристикою апарата розуміють залежність сумарної сили опору, що протидіє переміщенню рухливої системи, від ходу якоря. Сумарна сила опору складається з протидіючих сил що відключають і контактних пружин, ваги рухливої системи і сил тертя в підшипниках і шарнірах між рухливими деталями. При цьому протидіючі сили пружин і ваги завжди спрямовані в одну сторону незалежно від напрямку переміщення якоря, сили тертя змінюють свій напрямок у залежності від напрямку руху якоря. Характеристики звичайно будуються: для прямоходовых рухливих систем в осях «протидіюча сила Ротр - робочий зазор », для поворотних магнітних систем в осях «протидіючий момент Мотр - кут повороту », де Ротр і Мотр - відповідно відривне зусилля і момент.

Рис. 6.2. Механічна характеристика контактора:
а - при включенні, б - при відключенні
При включенні
Ротр = Рпруж G + Pтр , (6.1)
і відповідно
Мотр = Мпруж МG + Mтр, (6.2)
при відключенні
Ротр = Рпруж G - Pтр , (6.3)
і відповідно
Мотр = Мпруж МG - Mтр, (6.4)
де Рпруж - зусилля, що створені контактними пружинами ; і G - вага рухливої системи, у залежності від конструкції вага може протидіяти (+) чи допомагати (-) включенню; Ртр - сили тертя.
У загальному випадку механічна характеристика являє собою ламану лінію (мал. 6.2). Як приклад розглянемо побудову механічної характеристики електромагнітного контактора при включенні і відключенні. У точці 1 діють вага рухливої системи (крива 1), сила пружини, що відключає, (крива 2) і сили тертя (крива 3). При русі якоря Ротр зростає за рахунок додаткового тиску пружини, що відключає. У точці 2 відбувається зіткнення контактів, при цьому Ротр зростає стрибкоподібно за рахунок початкового натискання (крива 4), а потім плавно за рахунок додаткового стиску контактних пружин. Крива 5 являє собою суму кривих 1-4 і є механічною характеристикою розглянутого апарата.
Тягова характеристика Р (крива 6) являє собою залежність сили притягання електромагніта від зазору (відповідно залежність моменту притягання від кута повороту якоря). Рух якоря почнеться, коли електромагнітна сила притягання при = 1 стане більше протидіючої. Для забезпечення чіткого і надійного включення апарата тягова характеристика повинна лежати вище механічної і відповідати їй. У залежності від конструкції і роду струму електромагніта можуть бути отримані різного роду статичні тягові характеристики, як це показано на мал. 6.1.
Розташування котушки в магнітній системі відносно робочого зазору в значній мірі визначає потік розсіювання. Таким чином, при даній МДС значення сили притягування електромагніта також залежить від розташування котушки в магнітній системі. Велика сила притягування виходить, коли робочий зазор розташований усередині котушки. При цьому котушка повинна бути зміщена убік якоря.