

Исследование динамических характеристик сау
Передаточные функции автоматических систем
При анализе автоматической системы рассматриваются передаточные функции, относящиеся к самой системе.
Передаточная
функция разомкнутой системы
![]() –
отношение лапласовых изображений
выходной величины
Xвых к
ошибке
Х
при нулевых начальных условиях,
–
отношение лапласовых изображений
выходной величины
Xвых к
ошибке
Х
при нулевых начальных условиях,
![]()
Передаточная функция замкнутой системы определяется по соответствующему входу.
По
заданному воздействию
![]() –
главный оператор системы;
–
главный оператор системы;
по
возмущению
![]()
Частотная передаточная функция САУ
Частотная передаточная функция САУ получается из передаточной функции системы заменой S на iw:
![]() .
.
Переходный процесс САУ
Переходный процесс может быть вызван двумя причинами: начальным отклонением координат состояния системы и появлением внешнего входного воздействия. Это собственные движения в системе.
Для построения переходного процесса необходимо получить математическую модель САУ.
Исходные дифференциальные уравнения системы составляются двумя методами: общим и с помощью передаточных функций.
Первый метод основан на имеющихся дифференциальных уравнениях элементов системы, записанных в операционной форме. Составляется система уравнений, которая разрешается относительно Xвых:
![]() ,
,
где
![]() –
характеристический полином, определяющий
свободное движение системы;
–
характеристический полином, определяющий
свободное движение системы;
![]() –
полином, характеризующий влияние
задающего воздействия X3 на выходную
величину Xвых;
–
полином, характеризующий влияние
задающего воздействия X3 на выходную
величину Xвых;
![]() –
полином, характеризующий влияние
возмущающих воздействий xf
на
Xвых.
–
полином, характеризующий влияние
возмущающих воздействий xf
на
Xвых.
Систему уравнений можно разрешить относительно ошибки, тогда
![]() .
.
Допустим, САУ представлена структурной схемой (рис. 2.1).
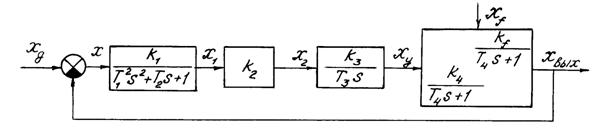
Рис. 2.1 Структурная схема САУ
Система дифференциальных уравнений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Использовав метод подстановки, разрешим систему уравнений относительно Xвых:
![]()

D(p) = a0 p4 + a1 p3 + a2 p2 +a3 p + a4;
N(p) = c0 p3 + c1 p2 + c2 p.
Аналогично можно разрешить систему уравнений относительно ошибки x.
Второй метод основан на передаточных функциях системы.
Необходимо получить передаточную функцию разомкнутой системы
![]() ,
,
где k1, k2, k3, k4 = kобщ k1 k2 k3 k4 = kобщ.
Передаточная функция управляемого объекта по возмущению
![]() .
.
Подставив эти выражения в уравнение, разрешенное относительно ошибки, получим:
![]() .
.

Аналогично составляем уравнения относительно Xвых:
![]()
Динамические характеристики САР можно получить аналитически с учетом фактических значений параметров всех звеньев или с использованием специальных программ (см. комплекс “Avtomat”).
Устойчивость сау
Устойчивость системы – это ее свойство возвращаться в состояние установившегося равновесия после снятия возмущения, нарушившего это равновесие.
Устойчивость
– необходимое условие для автоматической
системы:
![]()
Прямой способ исследования устойчивости системы заключается в нахождении решения однородного дифференциального уравнения. Переходные процессы носят затухающий характер.
Для упрощения анализа устойчивости находят корни характеристического полинома D(s)=0 . Система является устойчивой, если все вещественные корни и действительные части комплексных корней отрицательны.
Аналитическое нахождение корней полинома возможно до третьего порядка (включительно), а при порядке более третьего используют средства вычислительной техники (см. комплекс “Avtomat”).
Широко распространен метод Найквиста для проверки устойчивости САР. Система устойчива, если годограф частотной характеристики разомкнутой системы не охватывает точку с координатами (-1,0i) . Этот метод реализован в программном комплексе “Avtomat”.