

II. Система трех линейных уравнений с тремя неизвестными
Система трех линейных уравнений с тремя неизвестными имеет вид
![]()
![]()
![]()
![]() (7)
(7)
Определитель
![]()
![]()
![]() (8)
(8)
составленный из коэффициентов при неизвестных, называется определителем системы.
1. Если определитель системы
![]() ,
то система (7) имеет решение, и притом
единственное. Это решение находится по
формулам
,
то система (7) имеет решение, и притом
единственное. Это решение находится по
формулам
![]()

![]()

![]()
 (9)
(9)
Из этого заключаем, что значение неизвестного системы (7) равно дроби, знаменатель которой есть определитель системы, а числитель есть определитель, получающийся из определителя системы заменой в нем столбца из коэффициентов при определяемом неизвестном столбцом свободных членов.
Определители, стоящие в числителях дробей (9), будем обозначать соответственно через Dx, Dy, Dz.
2. Если D = 0, но, по крайней мере, один из его миноров и хотя бы один из определителей Dx, Dy и Dz не равен нулю, то система (7) решений не имеет. В этом случае говорят, что она противоречива, или несовместна.
3. Если D = 0 и все определители, стоящие в числителях дробей (9), - Dx, Dy, Dz - равны нулю, т. е. если
D = Dx = Dy = Dz = 0,
но хотя бы один из миноров в определителе D не равен нулю, то одно уравнение системы (7) является следствием двух других, и система трех уравнений (9) приводится к двум уравнениям, причем решения этих двух уравнений удовлетворяют третьему. В этом случае система (9) имеет бесконечное множество решений и называется неопределенной.
4. Если же все миноры в определителе D равны нулю, но хотя бы один из миноров в каком-нибудь из определителей Dx, Dy, Dz не равен нулю и хотя бы один из коэффициентов при неизвестных не равен нулю, то система несовместна и решений не имеет.
5. Если в определителях D, Dx, Dy, Dz все миноры равны нулю, но хотя бы один из коэффициентов при неизвестных нулю не равен, то два уравнения системы являются следствием третьего, и система трех уравнений приводится к одному уравнению, является неопределенной и имеет бесконечное множество решений, причем решения этого третьего уравнения удовлетворяют первому и второму уравнениям.
3.Линейные операции с векторами на плоскости и в пространстве.
Линейными операциями над векторам называются операции сложения векторов и умножения вектора на число.
Системы координат на плоскости и в пространстве
Прямолинейной системой координат на плоскости называется совокупность двух числовых осей с общим началом. Если масштабы на осях равны и оси перпендикулярны, то система координат называется прямоугольной декартовой. Обычно используется правая прямоугольная декартова система координат. Любая точка на плоскости однозначно определяется парой своих координат, и наоборот: любая пара действительных чисел задает единственную точку на плоскости.
Прямолинейной системой координат в пространстве называется совокупность трех числовых осей с общим началом, не лежащих в одной плоскости. Если масштабы на осях равны и оси перпендикулярны, то система координат называется прямоугольной декартовой. Обычно используется правая прямоугольная декартовая система координат. Любая точка в пространстве однозначно определяется тройкой своих координат, и наоборот: любая тройка действительных чисел задает единственную точку в пространстве.
Пусть даны две точки на плоскости А(х1у1) и В(х2,у2). Тогда расстояние между ними вычисляется по формуле d=√(x2 –x1)2+(У2 –У1)2 . Аналогично для двух точек в пространстве А(х1у1) и В(х2,у2) расстояние между ними вычисляется по формуле d=√(х2 –х1)^2 +(у2 –у1)^2 +(z2 –z1)^2 -
Векторы и линейные операции над ними _ _
Вектором называется направленный отрезок. Обозначаются векторы тремя способами: а, или а, или АВ. Два вектора равны, если их длины равны и они однонаправленны. Три вектора а Ь и с в пространстве называются компланарными, если они параллельны одной плоскости. Координаты вектора равны разности координат конца и начала. Сумма и разность векторов определяются по правилу треугольника:

Произведением вектора а на число λ называется вектор, длина которого равна |λ||а|; он однонаправлен с исходным, если λ>0, и противоположно направлен, если λ<0. Из определения суммы следуют правило параллелограмма для суммы двух векторов и правило многоугольника для суммы нескольких векторов:
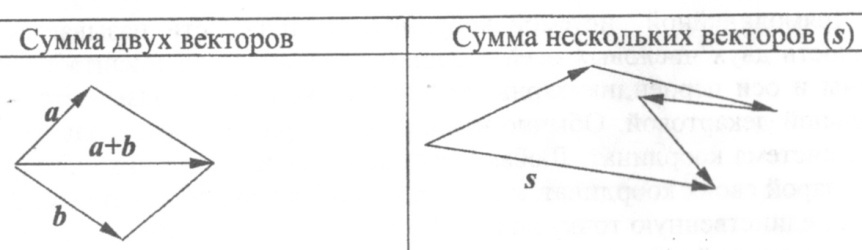
Если даны координаты векторов, то координаты суммы равны сумме координат, координаты разности равны разности координат, а координаты произведения вектора на число равны произведению координат на это число.