

5.4. Трение в винтовой кинематической паре
Р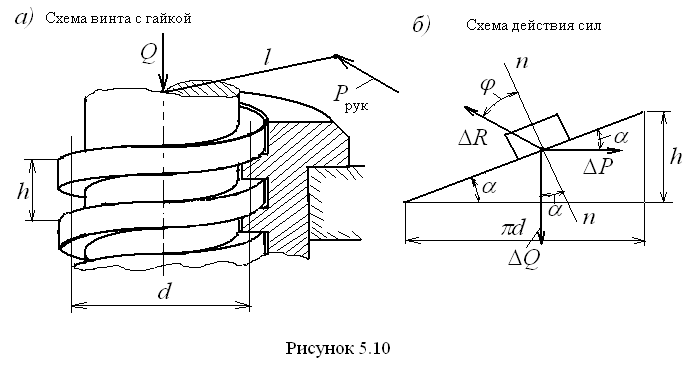 ассмотрим
винтовую кинематическую пару с
прямоугольной или трапецоидальной
резьбой (рис. 5.10, а).
Вдоль оси винта действует сила Q
вертикально вниз, прижимая витки винта
к виткам гайки. Средний диаметр винта
обозначен d,
шаг – h.
Шагом винта
называется расстояние между одноимёнными
точками двух соседних выступов,
измеренное в осевом направлении, нельзя
путать шаг с ходом
винта,
который представляет собой осевое
перемещение винта за один его оборот.
Если имеется
так называемый однозаходный
винт, то шаг
и ход совпадают, при n-заходном
винте ход равен
ассмотрим
винтовую кинематическую пару с
прямоугольной или трапецоидальной
резьбой (рис. 5.10, а).
Вдоль оси винта действует сила Q
вертикально вниз, прижимая витки винта
к виткам гайки. Средний диаметр винта
обозначен d,
шаг – h.
Шагом винта
называется расстояние между одноимёнными
точками двух соседних выступов,
измеренное в осевом направлении, нельзя
путать шаг с ходом
винта,
который представляет собой осевое
перемещение винта за один его оборот.
Если имеется
так называемый однозаходный
винт, то шаг
и ход совпадают, при n-заходном
винте ход равен
![]() (n
= 1, 2, 3, …)
Далее рассматривается однозаходный
винт.
(n
= 1, 2, 3, …)
Далее рассматривается однозаходный
винт.
Развернём
среднюю винтовую линию на плоскость
(рис. 5.10, б),
в результате чего получим прямоугольный
треугольник, горизонтальный катет
которого равен
![]() ,
а вертикальный – шагу h.
При этом винтовая линия превратится в
наклонную плоскость, рассмотренную
ранее. Возьмём небольшой участок витка
винта на этой наклонной плоскости и
покажем действующие на него силы. Так
как рассматривается не весь виток, а
только его небольшая часть, то силы,
приходящиеся на него, составляют только
части полных сил, то есть
,
а вертикальный – шагу h.
При этом винтовая линия превратится в
наклонную плоскость, рассмотренную
ранее. Возьмём небольшой участок витка
винта на этой наклонной плоскости и
покажем действующие на него силы. Так
как рассматривается не весь виток, а
только его небольшая часть, то силы,
приходящиеся на него, составляют только
части полных сил, то есть
![]() ,
,
![]() и
и
![]() .
При этом движущей силой является
,
действующая горизонтально. Сила
действует вертикально вниз, а
отклонена от нормали n-n
к наклонной плоскости на угол
.
.
При этом движущей силой является
,
действующая горизонтально. Сила
действует вертикально вниз, а
отклонена от нормали n-n
к наклонной плоскости на угол
.
По
существу, на схеме рис. 5.10, б
имеем частный случай 2 из рассмотренного
выше движения ползуна по наклонной
плоскости. Для этого случая сила
определяется формулой
![]() .
Суммируя по всей длине витка на
протяжении одного оборота, получаем
полную силу на окружности диаметра d:
.
Суммируя по всей длине витка на
протяжении одного оборота, получаем
полную силу на окружности диаметра d:
![]() .
Момент этой силы относительно оси винта
равен произведению её на средний радиус,
то есть
.
Момент этой силы относительно оси винта
равен произведению её на средний радиус,
то есть
![]() .
И, наконец, усилие на рукоятке для
вращения винта составляет величину,
равную отношению момента M
к длине рукоятки l:
.
И, наконец, усилие на рукоятке для
вращения винта составляет величину,
равную отношению момента M
к длине рукоятки l:
![]() .
.
Самотормозящийся винт получается, если, как и в случае наклонной плоскости, угол подъёма винтовой линии меньше угла трения . Самотормозящийся винт не будет вращаться при любой осевой силе Q. Легко себе представить, что с увеличением количества заходов угол увеличивается, и можно получить несамотормозящийся винт, который станет вращаться под действием осевой нагрузки.
Для
вычисления КПД
винтовой пары необходимо найти работу
полезной силы Q
по подъёму винта за один его оборот, то
есть на величину h,
и работу движущего момента M
за один оборот, то есть на угол
![]() .
Первая из них равна
.
Первая из них равна![]() ,
вторая –
,
вторая –
![]() ,
поэтому
,
поэтому
 .
.
Из
рис. 5.10, б
видно, что отношение
![]() ,
поэтому окончательно имеем
,
поэтому окончательно имеем
 .
.
5.5. Трение во вращательной кинематической паре
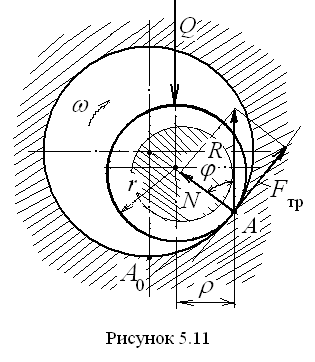
Рассмотрим
вращательную кинематическую пару в
наиболее часто встречающемся случае,
когда сопряжение вала с отверстием
осуществляется с зазором (рис. 5.11). На
указанном рисунке зазор между валом и
отверстием весьма преувеличен для того,
чтобы лучше видеть элементы сопряжения.
Вал нагружен поперечной силой
![]() ,
которая является известной величиной.
При отсутствии вращения окружность
вала касается окружности отверстия в
точке
,
которая является известной величиной.
При отсутствии вращения окружность
вала касается окружности отверстия в
точке
![]() на
его вертикальном диаметре. Когда вал
вращается в направлении
,
то, в результате действия силы трения
,
он «взбирается» на стенку вала и в
равновесном состоянии устанавливается,
касаясь окружности отверстия в точке
на
его вертикальном диаметре. Когда вал
вращается в направлении
,
то, в результате действия силы трения
,
он «взбирается» на стенку вала и в
равновесном состоянии устанавливается,
касаясь окружности отверстия в точке
![]() .
При этом реакция
стенки отверстия равна и противоположна
силе
.
Нормальная реакция
направлена вдоль нормали в точке касания
окружностей, то есть вдоль линии,
проходящей через точку касания и их
центры. Сила трения направлена по
касательной к окружностям, проходящей
также через точку касания
,
навстречу окружной скорости вала. Радиус
цапфы вала обозначен r
(цапфой называется участок вала, который
находится внутри отверстия опоры).
.
При этом реакция
стенки отверстия равна и противоположна
силе
.
Нормальная реакция
направлена вдоль нормали в точке касания
окружностей, то есть вдоль линии,
проходящей через точку касания и их
центры. Сила трения направлена по
касательной к окружностям, проходящей
также через точку касания
,
навстречу окружной скорости вала. Радиус
цапфы вала обозначен r
(цапфой называется участок вала, который
находится внутри отверстия опоры).
Сопротивление
вращению вала создаётся моментом трения
![]() ,
равным произведению силы трения на
радиус цапфы, то есть
,
равным произведению силы трения на
радиус цапфы, то есть
![]() .
Сила трения, как известно, определяется
формулой
.
Из силового треугольника по теореме
Пифагора имеем
.
Сила трения, как известно, определяется
формулой
.
Из силового треугольника по теореме
Пифагора имеем
![]() ,
или
,
или
![]() ,
откуда
,
откуда
 .
Поэтому сила трения
.
Поэтому сила трения
 ,
а момент трения
,
а момент трения
 .
Так как коэффициент трения
.
Так как коэффициент трения
![]() ,
то
,
то
![]() ,
тогда
,
тогда
![]() (например,
(например,
![]() ,
,
![]() ,
а
,
а
![]() ).
Поэтому можно принять, что
).
Поэтому можно принять, что
![]() .
Произведение радиуса цапфы на коэффициент
трения является для данных условий
постоянной величиной, определяемой
только геометрией вала и условиями
трения. Эта величина измеряется в
линейных единицах, обозначается
.
Произведение радиуса цапфы на коэффициент
трения является для данных условий
постоянной величиной, определяемой
только геометрией вала и условиями
трения. Эта величина измеряется в
линейных единицах, обозначается
![]() и называется кругом
трения,
который описывается этим радиусом при
вращении вала (круг трения на рис. 5.11
заштрихован). Так что радиус круга трения
и называется кругом
трения,
который описывается этим радиусом при
вращении вала (круг трения на рис. 5.11
заштрихован). Так что радиус круга трения
![]() .
Таким образом, при известном
момент трения вычисляется по формуле
.
Таким образом, при известном
момент трения вычисляется по формуле
![]() .
.
Значение круга трения заключается в том, что полная реакция во вращательной паре проходит по касательной к нему, никогда не пересекая его. При этом её направление таково, что момент реакции относительно центра вала направлен против скорости вращения вала.
Р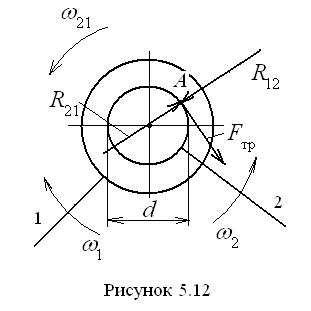 а с ч ё т п о т е р ь м о щ н о с т и н а
т р е н и е в о в р а щ а т е л ь -н о й
п а р е.
Реакции в кинематических парах,
вычисляемые с помощью методов планов
сил и других методов, являются, по
существу, нормальными реакциями, так
как они определялись в предположении
отсутствия трения. Это значит, что
коэффициент трения предполагался равным
нулю, и, соответственно угол трения
также принимался равным нулю. Поэтому
для определения мощности трения
а с ч ё т п о т е р ь м о щ н о с т и н а
т р е н и е в о в р а щ а т е л ь -н о й
п а р е.
Реакции в кинематических парах,
вычисляемые с помощью методов планов
сил и других методов, являются, по
существу, нормальными реакциями, так
как они определялись в предположении
отсутствия трения. Это значит, что
коэффициент трения предполагался равным
нулю, и, соответственно угол трения
также принимался равным нулю. Поэтому
для определения мощности трения
![]() необходимо знать момент силы трения и
относительную угловую скорость одного
звена пары по отношению к другому, то
есть
необходимо знать момент силы трения и
относительную угловую скорость одного
звена пары по отношению к другому, то
есть
![]() .
Представим на рис. 5.12 вращательную
пару, образованную звеньями 1 и 2, с
увеличенным изображением её элементов.
Предположим, что касание элементов пары
происходит в точке A.
В этой точке действуют реакции
со стороны первого звена на второе и
со стороны второго звена на первое. В
этой же точке приложена сила трения
,
препятствующая движению второго звена
относительно первого. Сила трения
определяется формулой
.
Представим на рис. 5.12 вращательную
пару, образованную звеньями 1 и 2, с
увеличенным изображением её элементов.
Предположим, что касание элементов пары
происходит в точке A.
В этой точке действуют реакции
со стороны первого звена на второе и
со стороны второго звена на первое. В
этой же точке приложена сила трения
,
препятствующая движению второго звена
относительно первого. Сила трения
определяется формулой
![]() (здесь и далее имеется в виду, что
рассматривается движение второго звена
относительно первого, а не наоборот).
Из рисунка видно, что момент трения
может быть определён как
(здесь и далее имеется в виду, что
рассматривается движение второго звена
относительно первого, а не наоборот).
Из рисунка видно, что момент трения
может быть определён как
![]() ,
где d
– диаметр цапфы вала. Относительная
угловая скорость
,
где d
– диаметр цапфы вала. Относительная
угловая скорость
![]() определяется с помощью метода обращения
движения: если обоим звеньям пары
сообщить движение с угловой скоростью,
равной и противоположно направленной
угловой скорости звена 1, то это звено
остановится, а второе будет вокруг него
вращаться с угловой скоростью
определяется с помощью метода обращения
движения: если обоим звеньям пары
сообщить движение с угловой скоростью,
равной и противоположно направленной
угловой скорости звена 1, то это звено
остановится, а второе будет вокруг него
вращаться с угловой скоростью
![]() ,
которая и будет относительной скоростью
звена 2 относительно звена 1. Таким
образом, мощность трения, равная
,
которая и будет относительной скоростью
звена 2 относительно звена 1. Таким
образом, мощность трения, равная
![]() ,
окончательно выразится формулой
,
окончательно выразится формулой
![]() .
.