

2.6. Синтез механизмов планетарного типа
Задача
синтеза заключается в подборе чисел
зубьев колёс механизма, обеспечивающих
заданное отношение угловых скоростей
входа и выхода. Заданными величинами
должны быть или передаточное отношение
(в планетарном механизме), или угловые
скорости (частоты вращения) – в
дифференциальном механизме. Используя
уравнения (а) и (б), подставляя в их левую
часть заданные значения, получают
величину
![]() .
Так как при неподвижном водиле получается
механизм с неподвижными осями колёс,
то для этого механизма задача подбора
чисел зубьев на данном этапе ничем не
отличается от ранее изложенных методик.
Особенностью синтеза является
необходимость учёта условий соосности,
соседства и сборки.
.
Так как при неподвижном водиле получается
механизм с неподвижными осями колёс,
то для этого механизма задача подбора
чисел зубьев на данном этапе ничем не
отличается от ранее изложенных методик.
Особенностью синтеза является
необходимость учёта условий соосности,
соседства и сборки.
У с л о в и е с о о с н о с т и заключается в том, что в механизмах планетарного типа оба центральные колеса и водило должны иметь общую неподвижную ось. В схеме рис. 2.7 это условие даёт возможность записать такое равенство
![]() .
.
Учитывая, что каждый радиус определяется формулой
![]() ,
,
можно заменить величины радиусов в приведённом выше выражении и после несложных преобразований записать
![]()
 .
.
Таким образом, выбирая числа зубьев колёс, необходимо учитывать последнее соотношение.
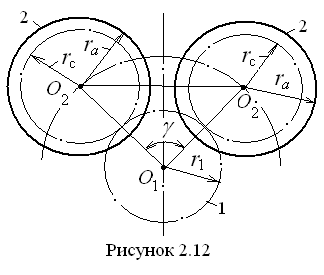
У с л о в и е с о с е д с т в а заключается в необходимости такого подбора чисел зубьев, чтобы сателлиты, связанные с одним водилом, при их количестве больше двух, не задевали друг друга. В противном случае механизм не может быть собран. Для вывода соответствующей зависимости обратимся к рис. 2.12.
На
рисунке показана центроидная окружность
центрального колеса 1 радиуса
,
по которой перекатываются центроидные
окружности сателлитов 2 радиусов
![]() .
Показаны также окружности вершин
сателлитов радиусов
.
Показаны также окружности вершин
сателлитов радиусов
![]() .
Эти окружности по условию соседства не
должны ни пересекаться, ни касаться
друг друга. Сателлиты 2 находятся на
угловом расстоянии γ
(гамма)
друг от друга. Так как сателлиты по
окружности располагаются равномерно,
то угол γ может быть определён из
отношения
.
Эти окружности по условию соседства не
должны ни пересекаться, ни касаться
друг друга. Сателлиты 2 находятся на
угловом расстоянии γ
(гамма)
друг от друга. Так как сателлиты по
окружности располагаются равномерно,
то угол γ может быть определён из
отношения
![]() ,
где K
– количество сателлитов, присоединённых
к одному водилу. Половина расстояния
между центрами сателлитов составляет
,
где K
– количество сателлитов, присоединённых
к одному водилу. Половина расстояния
между центрами сателлитов составляет
![]() .
Отрезок O1O2
представляет собой длину водила или
межосевое расстояние центрального
колеса 1 и сателлита 2:
.
Отрезок O1O2
представляет собой длину водила или
межосевое расстояние центрального
колеса 1 и сателлита 2:
![]() .
Радиус окружности вершин
.
Радиус окружности вершин
![]() .
Условие соседства выполняется, если
выполняется неравенство
.
Условие соседства выполняется, если
выполняется неравенство
![]() .
.
После выполнения несложных преобразований получаем окончательно
 .
.
Если
сателлит 2 представляет собой блок из
двух колёс, то в это неравенство в
качестве
![]() необходимо подставлять большее из них.
необходимо подставлять большее из них.
У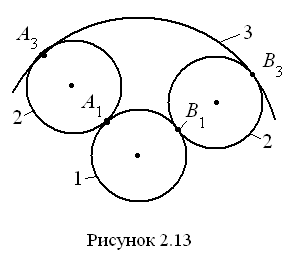 с л о в и е с б о р к и
заключается в возможности собираемости
механизма, то есть установки сателлитов,
если их количество больше одного. Ясно,
что один сателлит устанавливается между
центральными колёсами беспрепятственно
(если сателлитов несколько, то – первый
из них). Чтобы установить второй и другие
сателлиты, необходимо, чтобы их зубья
вступали в зацепление с зубьями
центральных колёс, а не натыкались на
них, иначе сборка невозможна. Для решения
задачи обратимся к рис. 2.13, на котором
показаны участок центрального колеса
3 с внутренними зубьями, центральное
колесо 1 и два параллельно работающих
сателлита 2 из нескольких, расположенных
по всему пространству между центральными
колёсами 1 и 3.
с л о в и е с б о р к и
заключается в возможности собираемости
механизма, то есть установки сателлитов,
если их количество больше одного. Ясно,
что один сателлит устанавливается между
центральными колёсами беспрепятственно
(если сателлитов несколько, то – первый
из них). Чтобы установить второй и другие
сателлиты, необходимо, чтобы их зубья
вступали в зацепление с зубьями
центральных колёс, а не натыкались на
них, иначе сборка невозможна. Для решения
задачи обратимся к рис. 2.13, на котором
показаны участок центрального колеса
3 с внутренними зубьями, центральное
колесо 1 и два параллельно работающих
сателлита 2 из нескольких, расположенных
по всему пространству между центральными
колёсами 1 и 3.
Обозначим
количество сателлитов в механизме
буквой K
. Так как все колёса образуют одинаковые
зацепления, то они имеют один модуль m
и шаг
.
Все центроидные окружности, показанные
на рисунке, предполагаются делительными.
Длина дуги A1B1
окружности колеса 1 между точками касания
этой окружности с окружностями сателлитов
2 составляет
![]() ,
то есть некоторое количество целых
шагов
,
то есть некоторое количество целых
шагов
![]() и возможную часть
и возможную часть
![]() последнего неполного шага. Если на этой
дуге помещается только целое количество
шагов, то
последнего неполного шага. Если на этой
дуге помещается только целое количество
шагов, то
![]() .
Точно так же можно записать и длину дуги
A3B3
окружности колеса 3:
.
Точно так же можно записать и длину дуги
A3B3
окружности колеса 3:
![]() .
С другой стороны, ясно, что эти дуги, при
условии равномерного расположения осей
сателлитов по окружности, составляют
длины
.
С другой стороны, ясно, что эти дуги, при
условии равномерного расположения осей
сателлитов по окружности, составляют
длины
![]() на окружности колеса 1 и
на окружности колеса 1 и
![]() на окружности колеса 3. Приравнивая
соответствующие выражения для колеса
1 и колеса 3, можно записать
на окружности колеса 3. Приравнивая
соответствующие выражения для колеса
1 и колеса 3, можно записать
![]() и
и
![]() .
.
Сокращая оба выражения на p и складывая их левые и правые части, имеем
![]() .
.
Левая
часть полученного равенства является
целым числом, поэтому правая часть
должна быть также целым числом. В правой
части
,
![]() и K
являются целыми числами, следовательно,
доли шага
и
и K
являются целыми числами, следовательно,
доли шага
и
![]() в сумме должны составить целое число,
а именно – единицу. Так как сумма в
квадратных скобках является целым
числом, то её можно обозначить
в сумме должны составить целое число,
а именно – единицу. Так как сумма в
квадратных скобках является целым
числом, то её можно обозначить
![]() (от англ.
integer
– целое число), то есть
(от англ.
integer
– целое число), то есть
![]() ,
и окончательно записать
,
и окончательно записать
![]() .
.
Выразив отсюда , запишем
![]() ,
,
что
является математическим выражением
условия сборки, то есть частное
от деления суммы чисел зубьев центральных
колёс на количество сателлитов
![]() механизма должно быть целым числом.
механизма должно быть целым числом.
Необходимо иметь в виду, что данное условие пригодно только для механизмов с одинарным сателлитом или со сдвоенным, но при одном модуле обоих колёс сателлита и сопряжённых с ними колёс. Для получения математического выражения условий сборки других схем можно обратиться к литературе.
Подытоживая рассмотренные решения, запишем все математические условия, которые необходимо учитывать при синтезе зубчатых механизмов планетарного типа. Например, для схемы механизма (рис. 2.7) составляется следующая система уравнений с неравенством:

![]()
.

В заключение рассмотрим пример синтеза механизма планетарного типа, схема которого изображена на рис. 2.7. Решение приводится с привлечением компьютерного математического пакета MathCAD версии 2001i Professional (листинг 2.1). Вычислительная программа составлена в соответствии с методикой, описанной в инструкции к пакету. Так как системы уравнений решаются методом итераций, то необходимо в самом начале задать искомым переменным, в нашем случае z1, z2, z3 и K, некоторые начальные значения. Они приведены ниже подзаголовка «Начальные условия». Затем идёт блок Given, в котором приведены вышеперечисленные уравнения и неравенство, связывающие между собой числа зубьев колёс и условия, которым они должны удовлетворять в механизме. Решающий блок Find содержит перечень искомых параметров и, после знака равенства, в виде матрицы автоматически выводятся найденные значения этих параметров.
В
связи с тем, что числа зубьев колёс и
количество сателлитов могут быть только
целыми, то полученные значения необходимо
округлить до целых, то есть принять
![]() ,
,
![]() ,
,
![]() и
и
![]() Естественно,
что при округлении чисел зубьев изменяется
передаточное отношение, поэтому последним
шагом расчёта является проверка его
величины. Она показала, что результат
округления не привёл к ошибке передаточного
отношения.
Естественно,
что при округлении чисел зубьев изменяется
передаточное отношение, поэтому последним
шагом расчёта является проверка его
величины. Она показала, что результат
округления не привёл к ошибке передаточного
отношения.