

3.3. Аналитический метод
Метод заключается в определении математических выражений, описы-вающих функциональную связь между входными и выходными параметрами механизма. Для этого служат различные приёмы и методы, такие как метод векторных контуров, который образуется заменой кинематических размеров звеньев векторами, с последующим проецированием этого контура на оси системы координат и получением на этой основе соответствующих уравнений, описывающих кинематику данного механизма. Этой же цели служит метод разбиения схемы механизма на прямо- или косоугольные треугольники, решая которые, получают необходимые математические выражения. Для составления некоторого первоначального представления о методе рассмотрим кинематику двух несложных механизмов.
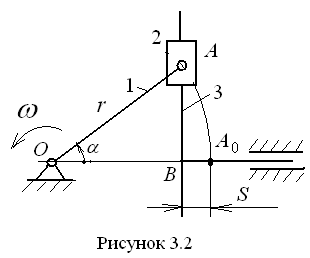
С и н у с н ы й м е х а н и з м (рис. 3.2) состоит из кривошипа, вращающегося вокруг неподвижной точки О, конец А которого образует вращательную кинематическую пару с ползуном 2. Ползун движется по вертикальному элементу ведомого звена 3, которое движется вдоль неподвижных горизонтальных направляющих. На первом этапе определяется зависимость перемещения S ведомого звена от угла α поворота ведущего кривошипа 1. Из рис. 3.2 видно, что
![]() .
.
Дифференцируя по в первый раз, получаем аналог скорости ведомого звена
![]() ,
,
дифференцируя во второй раз, получаем аналог ускорения ведомого звена
![]() .
.
Для
расчёта скорости и ускорения ведомого
звена необходимо воспользоваться
выражениями
![]()
![]()
К р и в о ш и п н о-п о л з у н н ы й м е х а н и з м (рис. 3.3) широко известен тем, что применяется во многих областях техники, например в качестве основного механизма двигателей внутреннего сгорания, поршневых насосов, компрессоров, в полиграфической технике – в станках для обработки стереотипов и др.
Схему
механизма возьмём в наиболее общем
виде, когда направляющая точки B
не проходит через центр вращения
кривошипа O1,
а располагается от неё на расстоянии
e,
называемом эксцентриситетом.
В данной схеме эксцентриситет принимается
отрицательным, так как отложен вниз от
точки O1.
Если он отложен вверх, то считается
положительным. В связи с наличием e
механизм называется эксцентричным или
нецентральным. Он состоит из кривошипа
1, вращающегося относительно стойки
0 вокруг точки O1
с угловой
скоростью ω1,
так что точка A
описывает
окружность радиусом r.
От кривошипа движение передаётся с
помощью шатуна 2 длиной l
на ползун 3, который движется
возвратно-поступательно вдоль
горизонтальных направляющих. В крайнем
правом положении точка B
ползуна занимает положение B0.
При этом кривошип 1 и шатун 2 выстраиваются
в одну прямую O1B0,
образующую угол ν
(ню) с горизонталью, синус которого
определяется формулой
![]() ,
и точка A
занимает
положение A0
на линии O1B0.
В текущем положении кривошип 1 повернут
относительно его крайнего положения
на угол α
в сторону вращения. При этом точка B
переместилась от её крайнего положения
на величину S.
,
и точка A
занимает
положение A0
на линии O1B0.
В текущем положении кривошип 1 повернут
относительно его крайнего положения
на угол α
в сторону вращения. При этом точка B
переместилась от её крайнего положения
на величину S.
З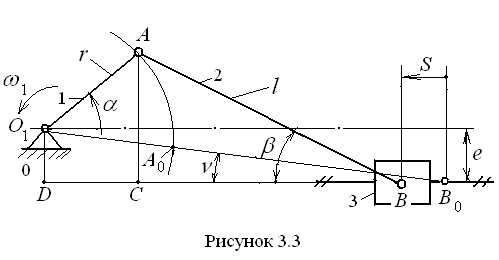 адача
исследования кинематики механизма
состоит в определении функции положения
и её первой и второй производных, то
есть аналогов скоростей и ускорений.
адача
исследования кинематики механизма
состоит в определении функции положения
и её первой и второй производных, то
есть аналогов скоростей и ускорений.
Как
видно из рис. 3.3, перемещение точки
B
от крайнего
положения B0
можно выразить как S=DB0
– DB,
причём, DB0
, согласно теореме Пифагора, определяется
как
![]() ,
а
,
а
![]() .
.
Для
определения угла
выразим длину вертикального отрезка
![]() двумя
путями, получая двойное равенство: имеем
двумя
путями, получая двойное равенство: имеем
![]() ,
от-куда
,
от-куда
![]() ,
или
,
или
![]() ,
где
,
где
![]() ,
является одной из геометрических
характеристик механизма и находится
обычно в пределах
,
является одной из геометрических
характеристик механизма и находится
обычно в пределах
![]() ,
а
,
а
![]() .
Имея в виду соотношение между синусом
и косинусом, получаем
.
Имея в виду соотношение между синусом
и косинусом, получаем
![]() .
Подставляя в S
все най-
.
Подставляя в S
все най-
денные выражения, получаем
![]() .
.
Или
 .
.
Для перехода к аналогам скорости и ускорения необходимо это выражение продифференцировать дважды по , то есть получить выражения вида
![]() и
и
![]() .
.
С
привлечением для вычислительного
процесса такого математического пакета,
как MathCAD,
нет необходимости выводить расчётные
зависимости
![]() и
и
![]() ,
так как сама программа по соответствующей
команде выведет необходимые выражения
и выполнит по ним расчёт.
,
так как сама программа по соответствующей
команде выведет необходимые выражения
и выполнит по ним расчёт.
Пример. Рассмотрим составление программы и решение по ней задачи исследования кинематики кривошипно-ползунного механизма в математическом пакете MathCAD 2001i Professional (Листинг 3.1)

Так как угол удобнее брать в градусах, а программа MathCAD требует применения угла в радианной мере, то на графиках ось абсцисс обозначена формулой перевода угла α из радианной меры в градусную.
Для
получения численных результатов анализа
необходимо ввести ранжированную
переменную
,
которой нужно задать пределы изменения
от 0 до
и шаг. Необходимо также ввести эту
переменную как аргумент для изменения
,
то есть представить
как функцию
в виде
![]() .
.
Для расчёта скоростей и ускорений точки B ползуна достаточно воспользоваться следующими формулами перехода
![]() и
и
![]() .
.
При этом те же графики, но с другими масштабами по осям ординат будут графиками изменения указанных кинематических функций. Численные значения кинематических функций можно получить также с помощью введения ранжированной переменной.