

Вопросы для самопроверки
1. Для чего применяются зубчатые механизмы?
2. Что такое передаточное отношение?
3. Какие зубчатые механизмы называют редукторами, мультипликаторами?
4. Как можно выразить передаточное отношение в паре зубчатых колёс?
5. Изобразите схему рядового, ступенчатого соединений зубчатых колёс.
6. Какая связь между передаточным отношением сложного зубчатого механизма и передаточными отношениями отдельных его ступеней?
7. Как определяется передаточное отношение в механизмах с рядовым и ступенчатым соединениями колёс?
8. Какие зубчатые механизмы являются механизмами планетарного типа (эпициклическими)?
9. В чём состоит основное достоинство механизмов планетарного типа?
10. Назовите элементы типовой схемы механизма планетарного типа.
11. Для чего и как применяется метод обращения движения?
12. Каковы особенности аналитического расчета механизмов планетарного типа различных схем?
13. Как выполняется синтез (проектирование) зубчатых механизмов с неподвижными осями колёс?
14. На чём основан графический метод исследования кинематики зубчатых механизмов?
15. Какова особенность графического расчёта кинематики дифференциального механизма с замкнутым контуром?
16. В чём заключаются условия соосности и соседства в механизмах планетарного типа?
17. Сформулируйте и объясните условие сборки при синтезе механизмов планетарного типа.
3. Кинематика и синтез механизмов
с низшими кинематическими парами
3.1. Задачи исследования кинематики.
Исходные данные. Методы исследования
В этом разделе изучается движение звеньев механизма и их точек вне зависимости от причин, вызывающих это движение. Основной задачей раздела является определение закона преобразования движения в механизме. Эта задача распадается на следующие.
1. Определение положений звеньев и траекторий отдельных их точек.
2. Определение угловых скоростей звеньев и линейных скоростей их точек и аналогов скоростей.
3. Определение угловых ускорений звеньев и линейных ускорений их точек и аналогов ускорений.
И с х о д н ы е д а н н ы е.
1. Кинематическая схема механизма со всеми кинематическими размерами его звеньев.
2.
Закон движения ведущего (входного) звена
(как правило,
![]() ).
).
М е т о д ы и с с л е д о в а н и я.
1. Аналитический метод.
2. Метод планов положений, скоростей и ускорений (графо-аналитический метод).
3. Метод кинематических диаграмм (метод графического дифференцирования).
4. Экспериментальный метод.
3.2. Кинематические и передаточные функции механизмов
К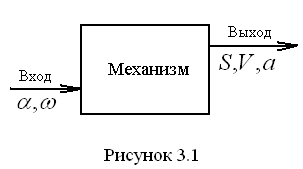 ак
известно, в любом механизме имеется
входное звено, в технологических машинах
совпадающее с ведущим звеном, и выходное
звено, связанное с исполнительным
органом машины. На рис. 3.1 в блочном
представлении изображён произвольный
механизм. Стрелками на рисунке показаны
входное и выходное звенья.
ак
известно, в любом механизме имеется
входное звено, в технологических машинах
совпадающее с ведущим звеном, и выходное
звено, связанное с исполнительным
органом машины. На рис. 3.1 в блочном
представлении изображён произвольный
механизм. Стрелками на рисунке показаны
входное и выходное звенья.
Под
стрелками указаны параметры входа:
![]() – угол поворота ведущего звена и
– его угловая скорость, и выхода, для
наиболее часто встречающегося случая
поступательного движения выходного
звена: S
– перемещение, V
– скорость и
a
– ускорение.
– угол поворота ведущего звена и
– его угловая скорость, и выхода, для
наиболее часто встречающегося случая
поступательного движения выходного
звена: S
– перемещение, V
– скорость и
a
– ускорение.
Зависимости
параметров выхода от времени являются
законом движения выходного звена и
называются также кинематическими
функциями. Они представляются в форме
![]() ,
,
![]() ,
называемой скоростью, и
,
называемой скоростью, и
 ,
называемой ускорением.
,
называемой ускорением.
Зависимость
параметров выхода механизма от параметров
входа характеризует внутреннее свойство
механизма преобразовать движение
независимо от времени. Первой зависимостью
такого рода является функция
положения
механизма, устанавливающая связь между
перемещением выходного звена и углом
поворота (то есть перемещением) входного
звена, то есть
![]() .
Первая производная функции положения
по
называется аналогом
скорости
(или передаточной
функцией скорости)
.
Первая производная функции положения
по
называется аналогом
скорости
(или передаточной
функцией скорости)
![]() .
.
Вторая производная функции положения по параметру называется аналогом ускорения (или передаточной функцией ускорения)
 .
.
Нетрудно
установить связь между кинематическими
функциями и их аналогами. Для этого
необходимо иметь в виду, что
![]() .
Тогда последние два выражения можно
переписать так:
.
Тогда последние два выражения можно
переписать так:
 ,
,
откуда следует, что аналог скорости является отношением скорости выходного звена к угловой скорости входного, и
 .
.
Из этого выражения видно, что аналог ускорения представляет собой отношение ускорения выходного звена к квадрату угловой скорости входного звена.
Поэтому можно утверждать, что аналоги скоростей и ускорений являются внутренними характеристиками механизма, отражающими закон преобразования движения и не зависящими от времени.