

3.12 Построение графика переменной составляющей приведенного момента инерции
На графике изображаются три составляющие
и четвертая - их суммарная величина.
Масштабный коэффициент
![]() .
.
Таблица 3.11 – Данные для построения графика переменной составляющей приведенного момента инерции
№ п/п |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
YА, мм |
22 |
32,2 |
50,4 |
53,6 |
42,4 |
27,6 |
22 |
28,8 |
42 |
54,2 |
50,2 |
33,6 |
22 |
YB, мм |
8,8 |
7 |
2,4 |
0 |
2,2 |
7 |
8,8 |
6,6 |
2,4 |
0 |
2,4 |
6,6 |
8,8 |
YC, мм |
0 |
6,8 |
16,2 |
16,8 |
9,6 |
2,6 |
0 |
2,8 |
9,6 |
17 |
16,2 |
6,8 |
0 |
YIIIП, мм |
30,8 |
46 |
69 |
70,4 |
54,2 |
37,2 |
30,8 |
38,2 |
54 |
71,2 |
68,8 |
47 |
30,8 |
3.13 Расчёт известной части постоянной составляющей приведенного
момента инерции
В постоянную составляющую приведенного момента инерции входят моменты инерции кривошипа и всех вращающихся звеньев:
![]() ,
,
где

![]()
![]()
![]() .
.
3.14 Составление схемы алгоритма по определению постоянной
составляющей приведенного момента инерции по методу Н.И. Мерцалова
В основу расчёта положен метод Н.И.
Мерцалова. Для определения изменения
кинетической энергии машины
![]() предварительно определяем работу сил
сопротивления
предварительно определяем работу сил
сопротивления
![]() .
.
![]() .
.
Все положения
![]()
![]()
Таблица 3.12 - Значения кинетической энергии машины
№ п/п |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
, Дж |
0 |
555,5 |
2130,8 |
3367,4 |
3812,6 |
3646,9 |
3252,7 |
2825,3 |
2397,2 |
1947,5 |
1375,8 |
626,4 |
0 |
YΔT, мм |
0 |
11 |
43 |
67 |
76 |
73 |
65 |
57 |
48 |
39 |
28 |
13 |
0 |
Изменение кинетической энергии
![]() звеньев с постоянным приведенным
моментом инерции
звеньев с постоянным приведенным
моментом инерции
![]() равно
равно
![]() ,
,
где
![]() - кинетическая энергия звеньев, создающих
переменную составляющую
- кинетическая энергия звеньев, создающих
переменную составляющую
![]() .
По методу Н.И. Мерцалова
определяется приближенно по средней
угловой скорости
.
По методу Н.И. Мерцалова
определяется приближенно по средней
угловой скорости
![]() :
:
![]() .
.
Все положения


Таблица 3.13 - Значения кинетической энергии звеньев
№ п/п |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
273,3 |
408,2 |
612,3 |
624,7 |
481,0 |
330,1 |
273,3 |
339,0 |
481,0 |
631,8 |
610,5 |
408,2 |
273,3 |
Находим значение изменяющейся
кинетической энергии от звеньев с
![]() =const:
=const:
Все положения
![]()
![]()
Таблица 3.14 - Значения изменяющейся кинетической энергии
№ п/п |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
-273,3 |
147,4 |
1518,5 |
2742,7 |
3331,7 |
3316,8 |
2979,4 |
2486,4 |
1916,2 |
1315,7 |
765,3 |
218,2 |
-273,4 |
YTI, мм |
-5 |
3 |
30 |
55 |
67 |
66 |
60 |
50 |
38 |
26 |
15 |
4 |
-5 |
Далее из полученного за цикл массива
значений
(рис. 3.8) находим максимальную
![]() и
при минимальном
и
при минимальном
![]() величины, используя которые вычисляем
максимальный перепад кинетической
энергии:
величины, используя которые вычисляем
максимальный перепад кинетической
энергии:
![]() ,
,
![]() .
.
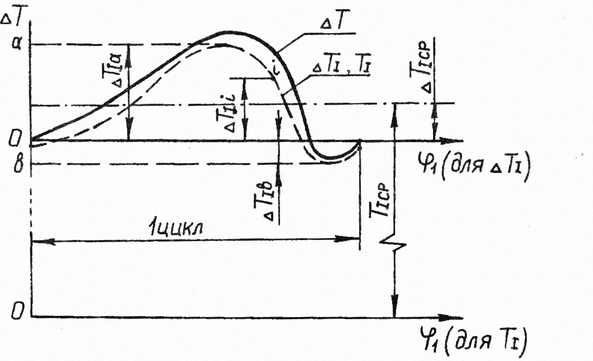
Рисунок 3.8 График изменения кинетической энергии
Тогда необходимая величина
![]() ,
при которой имеет место вращение звена
приведения с заданным коэффициентом
неравномерности
,
при которой имеет место вращение звена
приведения с заданным коэффициентом
неравномерности
![]() ,
равна:
,
равна:
 ,
(3.4)
,
(3.4)
где
![]()
![]()