

3.4.2 Аналитический метод решения
3.4 2.1 Составление схемы алгоритма расчета кинематических характеристик механизма
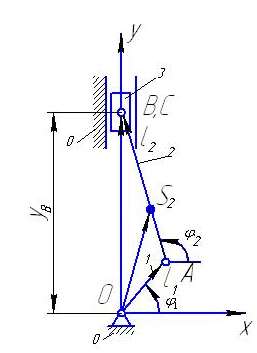
Рисунок 3.4. Расчетная схема механизма
Алгоритм вычислений кинематических характеристик механизма имеет вид (Методическое пособие «Динамика машин и механизмов в установившемся режиме движения»):
Примечание: 1. В формуле (3) a=+1, если ползун расположен сверху от начала координат, a=–1, если ползун расположен снизу.
3.4.2.2 Расчет кинематических характеристик рычажного механизма
Алгоритм вычислений полученный в пункте 3.4.2.1. используем для контрольного положения механизма с углом с углом φ1=30º в таблице 3.3. с результатами.
Таблица 3.3. Результаты расчета
№ п/п |
Параметры |
Формула |
Размерность |
Результат |
1 |
2 |
3 |
4 |
5 |
1 |
xA |
|
м |
0,076 |
2 |
yA |
|
м |
0,044 |
3 |
yB |
|
м |
0,386 |
4 |
|
|
- |
-0,217 |
5 |
|
|
- |
0,977 |
6 |
|
|
- |
-0,128 |
7 |
|
|
м |
0,085 |
8 |
|
|
- |
-0,218 |
Продолжение таблицы 3.3.
1 |
2 |
3 |
4 |
5 |
9 |
|
|
м |
-0,033 |
10 |
|
|
м |
0,049 |
11 |
|
|
м |
0,164 |
12 |
|
|
м |
-0,028 |
13 |
|
|
м |
0,079 |
14 |
|
|
м |
-0,049 |
15 |
|
|
м |
-0,036 |
16 |
|
|
м |
0,438 |
17 |
|
|
м |
0,052 |
Алгоритм вычислений полученный в пункте 3.4.2.1. используем для контрольного положения механизма с углом с углом φ1=210º в таблице 3.4. с результатами.
Таблица 3.4. Результаты расчета
№ п/п |
Параметры |
Формула |
Размерность |
Результат |
1 |
2 |
3 |
4 |
5 |
1 |
xA |
|
м |
-0,076 |
2 |
yA |
|
м |
-0,044 |
3 |
yB |
|
м |
0,298 |
4 |
|
|
- |
0,217 |
5 |
|
|
- |
0,977 |
6 |
|
|
- |
0,128 |
7 |
|
|
м |
-0,066 |
8 |
|
|
- |
0,218 |
Продолжение таблицы 3.4.
1 |
2 |
3 |
4 |
5 |
9 |
|
|
м |
0,055 |
10 |
|
|
м |
-0,049 |
11 |
|
|
м |
0,076 |
12 |
|
|
м |
0,028 |
13 |
|
|
м |
-0,079 |
14 |
|
|
м |
0,049 |
15 |
|
|
м |
0,052 |
16 |
|
|
м |
0,438 |
17 |
|
|
м |
0,140 |
Сравним результаты расчетов, полученные графическим и аналитическим методами для 3-го положения, в таблице 3.5, а для 9-го в таблице 3.6.
Таблица 3.5. Сравнение полученных результатов.
Переменная |
Размерность |
Аналитический метод |
Графический метод |
yB |
м |
0,386 |
0,382 |
|
град. |
102,5 |
102 |
|
м |
0,049 |
0,05 |
|
м |
0,164 |
0,162 |
|
– |
-0,128 |
0,131 |
|
м |
0,085 |
0,086 |
|
м |
-0,028 |
0,028 |
|
м |
0,079 |
0,080 |
Таблица 3.6. Сравнение полученных результатов.
Переменная |
Размерность |
Аналитический метод |
Графический метод |
yB |
м |
0,298 |
0,296 |
|
град. |
77,5 |
78 |
|
м |
-0,049 |
0,05 |
|
м |
0,076 |
0,076 |
|
– |
0,128 |
0,129 |
|
м |
-0,066 |
0,066 |
|
м |
0,028 |
0,028 |
|
м |
-0,079 |
0,072 |