

Федеральное государственное бюджетное образовательное учреждение выс-
шего профессионального образования
«ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
__________________________________________________________
Кафедра «Автоматизированное проектирование»
Копылов А.З.
Теория механизмов и машин
Курс лекций
Санкт-Петербург, 2018
1. СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
Курс “Теория механизмов и машин” (ТММ) изучает наиболее общие методы исследования свойств механизмов и машин и проектирования их схем. Этот курс можно условно подразделить на две части, соответственно изучающие:
структуру, классификацию и кинематику механизмов (рассматриваются строение механизмов, группировка их по определенным признакам и движение без учета причин, его вызывающих);
динамику механизмов и машин (рассматривается их движение под действием приложенных сил).
В обеих частях выполняется решение двух взаимосвязанных задач: анализа, т. е. исследования свойств заданных (уже известных) схем механизмов и машин,
исинтеза, т. е. проектирования схемы механизма или машины с заданными структурными, кинематическими или динамическими свойствами.
2. Основные понятия и определения
Любое техническое устройство, в том числе механизм или машина, всегда состоит из целого ряда отдельно изготовленных частей, именуемых деталями. Однако при изучении работы механизма или машины можно прийти к заключению, что несколько жестко скрепленных деталей могут составлять систему, которая движется как единое твердое тело. Такую совокупность деталей называют звеном, и это понятие очень удобно использовать при исследовании движения механической системы. Иногда отдельное звено состоит всего из одной детали, но все-таки чаще всего - из нескольких. Звенья могут быть связаны друг с другом либо непосредственно, либо с помощью дополнительных элементов: ремней, тросов и т. п., именуемых гибкими связями. Используемые в механизмах и машинах жидкости и газы звеньями не считаются и называются рабочими телами.
Соединение двух соприкасающихся звеньев, которое допускает их относительное движение, называется кинематической парой (или просто парой). При этом каждое из звеньев имеет свой элемент кинематической пары - геометрическое место точек возможного контакта с другим звеном, входящим в пару. Звенья бывают простыми и сложными. Простое звено входит в состав одной или двух пар, а сложное- трех и более.
Совокупность звеньев, связанных между собой кинематическими парами, называется кинематической цепью (или просто цепью). Цепи могут быть замкнутыми, если каждое звено входит не менее чем в две кинематические пары, и не-
замкнутыми.
Механизмом называют кинематическую цепь, предназначенную для преобразования заданного движения одного или нескольких звеньев в требуемое движение других звеньев. Те звенья, которым задается движение, называются входными, а те, что выполняют требуемые (целевые) движения, - выходными. Движение звеньев механизма удобнее рассматривать относительно одного из них, которое принимается за неподвижное. Такое звено называется стойкой и на схемах
2
отмечается штриховкой. Начальным звеном будем называть звено, которому приписывают одну (очень редко - несколько) из обобщенных координат механизма, однозначно определяющих положения всех его подвижных звеньев относительно стойки. В большинстве случаев в качестве начального выбирают входное или выходное звено, с которого начинают определять положения остальных. Помимо этого будем различать ведущие и ведомые звенья. Ведущим называют звено, для которого сумма элементарных работ приложенных к нему внешних сил положительна. Для ведомого звена она отрицательна. Обычно ведущее звено совпадает с входным, но могут быть случаи, когда в процессе движения входное звено попеременно становится то тем, то другим. Например, поршень двигателя внутреннего сгорания, являясь входным звеном, на такте горения топливной смеси будет ведущим, а на тактах выпуска, впуска и сжатия - ведомым. Кроме того, нужно учитывать, что при рассмотрении отдельных узлов механизма или машины одно и то же звено может быть ведомым по отношению к одним звеньям и ведущим по отношению к другим. В том же автомобильном двигателе распределительный (кулачковый) вал будет ведомым по отношению к коленчатому валу, но ведущим по отношению к коромыслам, а также впускным и выпускным клапанам.
Кинематическим соединением называется кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару. При этом только два звена этой цепи могут соединяться с другими звеньями механизма. Примером такого устройства служит шарикоподшипник, внешнее и внутреннее кольца которого сочленяются со звеньями, образующими как бы одноподвижную вращательную пару 5-го класса.
Кинематические пары, цепи и механизмы называют плоскими, если точки их движущихся звеньев описывают траектории, лежащие в параллельных плоскостях. В противном случае они будут пространственными.
Машиной будем называть устройство, выполняющее механические движения для преобразования энергии, материалов или информации с целью замены или облегчения физического и умственного труда. В состав машины может входить один или несколько механизмов, а сами машины, в свою очередь, могут объединяться в сложные механические системы (машинные агрегаты, машиныавтоматы, промышленные роботы и т. д.).
Как уже отмечалось выше, в курсе “Теория механизмов и механика машин” рассматриваемые объекты изображаются в виде схем. Схемы могут быть структурными и кинематическими. Структурная схема кинематической цепи или механизма указывает только звенья и характер их взаимосвязи, т. е. вид кинематических пар. Кинематическая схема в дополнение к этому вычерчивается в масштабе с указанием тех размеров, которые определяют кинематические параметры механизма. Оба вида схем необходимо вычерчивать в соответствии с принятыми условными обозначениями по ГОСТ 2.770–68 .
3

1.Структурный анализ и синтез рычажных механизмов
Вэтой главе рассматриваются основные понятия, относящиеся к строению механизмов.
Кинематические пары классифицируют по двум признакам [1,9,14,18].
1. По количеству ограничений, накладываемых кинематической парой на относительное движение звеньев, входящих в кинематическую пару. По этой классификации класс кинематической пары и равен количеству ограничений, накладываемых кинематической парой на относительное движение звеньев. Поскольку свободное тело в пространстве имеет 6 степеней свободы, то в принципе существует 5 классов кинематических пар. Однако практическое применение имеют, как правило, лишь пары 5, 4 и 3 класса.
2. По характеру контакта звеньев в кинематической паре. По этой классификации кинематические пары делятся на:
а) Низшие – такие, контакт в которых происходит по поверхности.
б) Высшие – такие, контакт в которых происходит по линии или в точке.
Здесь необходимо уточнить, что при классификации кинематических пар приняты следующие допущения:
а) Форма контактирующих поверхностей идеальна. б) В кинематических парах отсутствуют зазоры.
На рис. 1.1 представлены примеры.На рис 1.1а – кинематическая пара 5 класса, низшая. Она отнимает 5 степеней свободы, оставляя только одну – вращательную. Контакт между звеньями происходит по цилиндрической поверхности.
На рис 1.1б – кинематическая пара 4 класса, низшая. Она отнимает 4 степеней свободы, оставляя две – одну вращательную и одну поступательную. Контакт между звеньями происходит по цилиндрической поверхности.
4

На рис 1.1в – кинематическая пара 4 класса, высшая (зубчатое зацепление). Она отнимает 4 степеней свободы, оставляя две – возможность вращения колес и скольжения контактирующих поверхностей. Контакт между звеньями происходит по линии.
На рис 1.1г – кинематическая пара 3 класса, низшая (шаровой шарнир). Она отнимает все 3 поступательные степени свободы, оставляя три вращательных. Контакт между звеньями происходит по сферической поверхности.
Следующая структурная единица это кинематическая цепь – связная совокупность звеньев, образующих кинематические пары. Кинематические цепи в зависимости от расположения звеньев могут быть:
а) Плоские, т.е. такие, все движения звеньев которых происходят в одной или параллельных плоскостях (рис. 1.2а).
б) Пространственные (рис. 1.2б). Кроме того, они могут быть:
а) Замкнутые (рис. 1.2а). б) Разомкнутые (рис. 1.2б).
Теперь можно дать структурное определение механизма: механизмом называется кинематическая цепь, одно звено которой считается неподвиж-
ным. То есть механизм образуется из кинематической цепи закреплением одного из звеньев (рис. 1.2в,г,д). Это неподвижное звено называют стойкой и относительно него рассматриваются движения остальных звеньев.
5

1.2. Число степеней свободы механизма
Это одно из важнейших структурных понятий. Ранее для него применялся термин “подвижность” механизма. По физическому смыслу это количество независимых движений, которые могут совершать звенья механизма. Каждой степени свободы соответствует своя обобщённая координата, т.е. число степеней свободы равно количеству обобщенных координат.
Число степеней свободы пространственных механизмов вычисляется по формуле Сомова-Малышева [1, 9, 14, 18]:
5 |
(1.1) |
W 6n kpk |
k 1
где n – количество подвижных звеньев в механизме, pk – количество кинематических пар k-го класса.
Формула (1.1) получена умозрительно. Действительно,6n – это общее количество степеней свободы, которые имели бы n звеньев, будучи свободными, а k.pk – это количество степеней свободы, которые отнимают кинематические пары
5
k-го класса, kpk – общее количество степеней свободы, которые отнимают все
k 1
кинематические пары.
Пример.У механизма на рис. 1.2г четыре подвижных звена и четыре кинематические пары 5-го класса, следовательно,W = 6.4 – 5.4 = 4. Обобщенными координатами этого механизма являются параметры относительного положения звеньев 1, 2, S3, 4. И все эти движения могут происходить независимо друг от друга.
Число степеней свободы плоских механизмов вычисляется по формуле Че-
бышева [1, 9, 14, 18]:
W 3n 2 p5 p4 3n 2 pН |
pВ |
(1.2) |
|
|
где pН – количество низших, pВ – количество высших кинематических пар.
В плоских механизмах кинематические пары 5-го класса всегда низшие, а 4-го класса всегда высшие. Этим и объясняется второе равенство в формуле (1.2).
Пример.У механизма на рис. 1.2д три подвижных звена и четыре кинематические пары 5-го класса, следовательно W = 3.3 – 2.4 = 1. Обобщенной координатой является угол поворота 1 звена 1. В этом механизме независимым будет только вращение звена 1.
Следует иметь ввиду, что формулы (1.1) и (1.2) справедливы только для механизмов без пассивных связей. Пассивная связь – это, как правило, звено, удаление которого из механизма не влияет на его кинематику, то есть с точки зрения кинематики оставшиеся звенья будут совершать те же движения. Подобные звенья вводят в механизм для увеличения его прочности или жесткости. Пример механизма с пассивной связью представлен на рис. 1.3. Очевидно, что удаление звена 4 не повлияет на характер движения звеньев 1, 2, 3. Од-
6

нако, это справедливо не для любого сочетания размеров звеньев, а лишь тогда, когда l1 = l3, l2 = l4. Поэтому, непосредственное применение формулы (1.2) к этому механизму дает результат: W = 3 . 4 – 2 . 6 = 0.
Таким образом, прежде, чем применять формулы (1.1), (1.2) следует из механизма условно удалить все пассивные связи. В литературе можно встретить более сложные формулы для вычисления числа степеней свободы, в которые входят слагаемые, учитывающие пассивные связи. Однако использование этих зависимостей все равно требует предварительной диагностики того, какие связи являются пассивными.
1.3. Структурные группы
Это понятие впервые было введено в начале 20 века русским ученым Ассуром. Поэтому структурные группы часто называют группами Ассура. По опре-
делению структурной группой называется кинематическая цепь, которая будучи своими внешними кинематическими парами установлена на стойку имеет число степеней сво-
боды W = 0. В дальнейшем эти понятия были развиты И.И. Артоболевским, поэтому классификацию, которой далее мы будем использовать, обычно называют классификацией Ассура-Артоболевского.
По данной классификации структурной группе приписывают класс и порядок. Классом структурной
группы считается количество кинематических пар во внутреннем контуре группы. Порядком – считается количество кинематических пар, которыми она присоединяется к остальному механизму. На рис. 1.4 дан пример структурной группы 3-го класса 3-го порядка. Здесь звенья 4, 5, 6 образуют внутренний контур, в котором три кинематические пары. К остальному механизму данная группа присоединяется тремя шарнирами: A, B, C.
Кнедостаткам данной классификации можно отнести то, что структурные группы, которым приписывается 2-й класс, 2-й порядок не имеют ярко выраженного признака второго класса. На рис. 1.5 показаны все виды таких групп.
Кмеханизму эти группы присоединяются внешними кинематическими па-
рами.
При структурном анализе механизма ему присваивают класс равный наивысшему классу входящей в него структурной группы. Здесь мы будем рассматривать только плоские рычажные механизмы 2-го класса 2-го порядка. Они являются наиболее простым, но широко применяемым видом рычажных механизмов. Их структура легко поддается классификации, для них удается получить аналитическое решение задачи кинематического анализа.
7
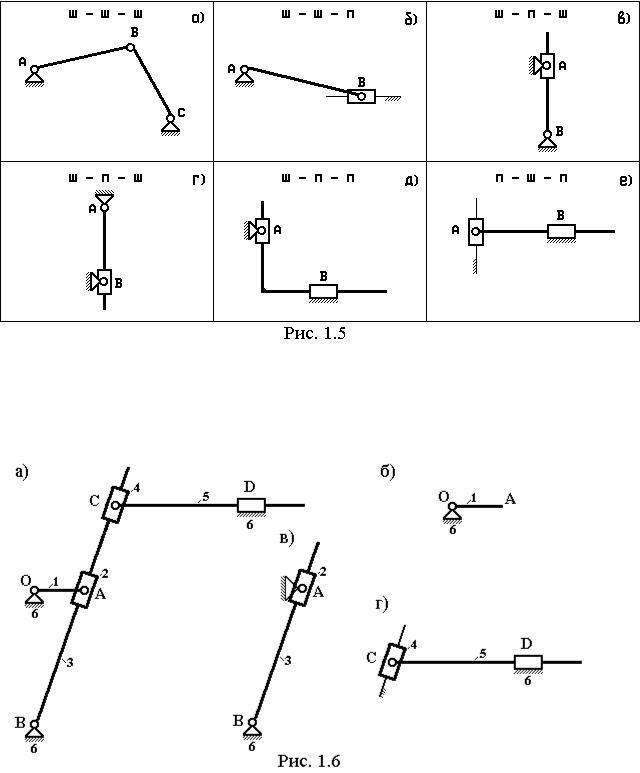
На рис. 1.6 дан пример структурного анализа механизма. На рис. 1.6а изображен шестизвенный, плоский рычажный механизм. Структурно он делится на входное звено – кривошип ОА (рис. 1.6б) имеющее число степеней свободы W = 1 и две структурные группы 2-го класса, 2-го порядка (рис. 1.6в,г).
1.4. Структурный синтез механизмов с помощью групп Ассура
Структурный синтез механизмов с помощью структурных групп сводится к тому, что к входному механизму или к нескольким входным механизмам присоединяются структурные группы. При этом, поскольку число степеней свободы группы Ассура W = 0, то её присоединение к механизму не меняет числа степе-
8

ней свободы. На рис. 1.7 приведены примеры такого синтеза. На рис. 1.7а сформирован шестизвенный механизм 2-го класса 2-го порядка, структурно состоящий из входного кривошипа 1 и двух структурных групп: ABC и DE. Поскольку у входного механизма число степеней свободы W = 1, то и у всего механизма – тоже. На рис. 1.7б синтезирован пятизвенный механизм с числом степеней свободы W = 2. Здесь входные звенья – 1-е и 2-е, а ABC – структурная группа.
При таком синтезе созданный мехзанизм не будет иметь пассивных связей. Если при дальнейшей проработке они потребуются по соображениям прочности или жесткости, то они могут быть введены конструктивно.
1.5. Диагностика наличия пассивных связей
При формировании механизма из структурных групп вопрос о наличии пассивных связей в механизме не возникает. Но он может возникнуть при анализе уже существующих механизмов или нарисованных “от руки”, например, заказчиком.
Алгоритм диагностики пассивных связей основан на анализематрицы смежности механизма, которая представляет собой квадратную таблицу с количеством строк и столбцов, равным числу звеньев, включая стойки.
Матрица смежности формируется следующим образом. В каждой её ячейке с индексами “i”, “j”, где i– номер строки, j– номер столбца, ставится “0”, если i-е и j-е звенья не образуют кинематической пары. Если же они образуют кинематическую пару, то ставится цифра, равная числу степеней свободы этой кинематической пары.
Рассмотрим “классический” пример механизма с пассивной связью (см. рис. 1.3). Составим для него матрицу смежности (табл. 1.1, нули опущены).
Таблица 1.1
N |
1 |
|
2 |
|
3 |
4 |
|
5 |
|
1 |
|
- |
|
1 |
|
1 |
|
|
1 |
2 |
|
1 |
|
- |
1 |
|
|
|
|
3 |
|
|
|
1 |
- |
1 |
|
|
1 |
4 |
|
1 |
|
|
1 |
- |
|
|
|
5 |
|
1 |
|
|
1 |
|
|
- |
|
При её анализе примем во внимание, что матрица симметрична, и анализировать достаточно или строки или столбцы, будем анализировать строки.
9

Определим для матрицы смежности понятие “прямоугольник на матрице смежности” (в таблице 1.1 он выделен фоном). Это ситуация, когда в n строках на одних и тех же местах стоит более,чем n единиц. Длинами сторон прямоугольника считается количество единиц по его горизонтали и вертикали.
Наличие в матрице смежности “прямоугольников” и указывает на пассивные связи. При этом их количество, на которое указывает один “прямоугольник” равно разности длин его сторон. Номера столбцов указывают на те звенья, из которых надо выбрать пассивные.
Естественно, что выбор того, какое (или какие) из звеньев является пассивным остается за конструктором. В рассматриваемом примере 1-я и 3-я строки образуют “прямоугольник” с разностью длин сторон: 3–2=1, следовательно, одно из звеньев 2, 4 или 5 является пассивным. Звено 5 (стойку) можно исключить из рассмотрения, а звенья 2 и 4 с точки зрения пассивности действительно равнозначны, любое одно из них может быть удалено из механизма.
Рассмотрим более сложный пример (рис. 1.8). Для этого механизма матрицу смежности можно составить двояко. В узле “B” сходится три звена, следовательно, этом узле две кинематические пары.
Вариант 1. Полагаем, что в узле “B” шарниры
имеют место между звеньями 2-4 и 3-4. Матрица смежности для этого случая представлена в табл. 1.2.
Таблица 1.2
N |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
- |
1 |
|
|
|
|
|
1 |
2 |
1 |
- |
|
1 |
|
|
|
|
3 |
|
|
- |
1 |
|
|
|
1 |
4 |
|
1 |
1 |
- |
1 |
|
1 |
|
5 |
|
|
|
1 |
- |
|
|
1 |
6 |
|
|
|
1 |
|
- |
1 |
|
7 |
1 |
|
1 |
|
1 |
|
1 |
- |
Вариант 2. Полагаем, что в узле “B” шарниры имеют место между звеньями 2-3 и 3-4. Матрица смежности для этого случая представлена в табл. 1.3.
Таблица 1.3
N |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
- |
1 |
|
|
|
|
|
1 |
2 |
1 |
- |
1 |
|
|
|
|
|
3 |
|
1 |
- |
1 |
|
|
|
1 |
4 |
|
|
1 |
- |
1 |
|
1 |
|
5 |
|
|
|
1 |
- |
|
|
1 |
6 |
|
|
|
1 |
|
- |
1 |
|
7 |
1 |
|
1 |
|
1 |
|
1 |
- |
10