

4.2. Сложение сил и разложение силы на составляющие.
С![]()
![]() ложение
сил - задача нахождения равнодействующей
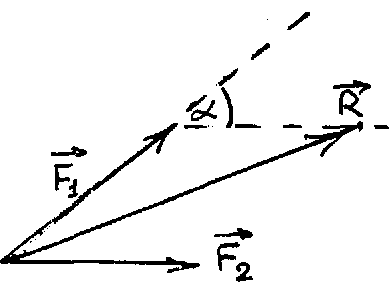
для заданной системы сил. Находить
равнодействующую можно аналитически
и геометрически. В простом случае
системы двух сил (рис. 18) можно аналитически
выразить величину равнодействующей
силы:
ложение
сил - задача нахождения равнодействующей
для заданной системы сил. Находить
равнодействующую можно аналитически
и геометрически. В простом случае
системы двух сил (рис. 18) можно аналитически
выразить величину равнодействующей
силы:
 (рис
18)
(рис
18)
где - угол между направлениями сил системы.
 (рис
19)
(рис
19)
Рис.19 является частным случаем правила силового многоугольника, по которому описанная операция проводится последовательно для всех сил системы, независимо от их ориентировки в пространстве. Начало вектора равнодействующей совпадает с точкой приложения первой (по построению) силы системы, а конец - с концом вектора последней.
 (рис
20)
(рис
20)
Разложением сил на составляющие называют задачу нахождения системы сил, для которой данная сила является равнодействующей. Например, для искомой системы двух сил задаются направления линий действия сил системы (рис.20). Через начало и конец вектора заданной силы проводят прямые, параллельные указанным направлениям. Искомые силы системы определяются сторонами полученного параллелограмма .
4.3. Проекции силы на плоскость и ось.
Проекцией силы на плоскость называют вектор Fxy, заключенный между проекциями начала и конца вектора силы на заданную плоскость (рис. 21).
Аналогично - проекцией силы на ось называют отрезок, заключенный между проекциями начала и конца вектора силы на заданную ось (рис. 22).
В отличие от проекции на плоскость, проекция силы на ось является скалярной величиной.

 (рис
22)
(рис
22)
4.4. Статическое и динамическое проявление сил.
В процессе взаимодействия (в результате действия сил) тела изменяют свое внутреннее состояние и (или) состояние движения. В соответствии с этим рассматривают статическое проявление сил (приводящее к изменению внутреннего состояния тел) и динамическое (приводящее к изменению состояния движения). Например, при скольжении тела по наклонной плоскости сила его тяжести проявляется двояким образом: сообщая телу ускорение (динамически) и деформируя его в результате взаимодействия с наклонной плоскостью (статически). Поэтому в самом общем смысле все способы измерения сил можно разделить на два класса - статические и динамические. Пример: пружинный динамометр и акселерометр.
4.5. 1-й ЗАКОН НЬЮТОНА (ЗАКОН ИНЕРЦИИ).
Существуют такие системы отсчета, в которых тело, предоставленное самому себе, может находиться в состоянии покоя или равномерного и прямолинейного движения, пока и поскольку действие внешних сил не вынудят его изменить это состояние.
Способность тел сохранять состояние покоя или равномерного и прямолинейного движения, препятствуя внешним воздействиям, называется инертностью. Это – внутреннее свойство, присущее всем телам, независимо от их природы и состояния. Причины же, вызывающие изменения состояния тела, всегда внешние - это силы.
Количественной мерой инертности тел является их масса.
4.6. 2-й ЗАКОН НЬЮТОНА (ОСНОВНОЙ ЗАКОН ДИНАМИКИ).
Как и все законы динамики основной закон получен опытным путем. В частном случае, когда масса тела в процессе взаимодействий не изменяется, основной закон динамики формулируется в форме: ускорение, получаемое телом в результате действия на него системы сил, прямо пропорционально
равнодействующей приложенной системы сил, обратно пропорционально массе тел и направлено вдоль линии действия равнодействующей.
М
![]() атематическая
формулировка частной формы основного
закона динамики имеет вид:
атематическая
формулировка частной формы основного
закона динамики имеет вид:
где: F - равнодействующая приложенной системы сил.
Более общей является следующая формулировка основного закона:
Изменение импульса тела пропорционально импульсу равнодействующей приложенной системы сил и направлено вдоль линии действия равнодействующей.
П![]()
![]() од
импульсом силы понимают произведение
силы на время ее действия. Математическая
формулировка общей формы основного
закона динамики имеет вид:
од
импульсом силы понимают произведение
силы на время ее действия. Математическая
формулировка общей формы основного
закона динамики имеет вид:
4.7. 3-й ЗАКОН ДИНАМИКИ (ЗАКОН ДЕЙСТВИЯ И ПРОТИВОДЕЙСТВИЯ).
Существует две равноправные формулировки 3-го закона:
-
Действию всегда есть равное и противоположно направленное противодействие
-
Тела действуют друг на друга с силами, равными по величине и противоположно направленными.
Эти формулировки получены в результате обобщения экспериментальных фактов, которые свидетельствуют о том, что тела взаимодействуют всегда попарно, т.е. на изолированное тело силы не действуют.
С 3-м законом динамики тесно связан закон сохранения импульса. Действительно, если на два тела действуют только силы взаимодействия между ними, то, по 3-му закону динамики, эти силы равны по величине и противоположно направлены. Следовательно, по основному закону, одинаковы и противоположно направлены изменения импульсов тел, а общий импульс системы тел не изменяется.