

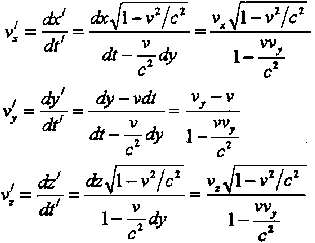
8.9. Преобразования компонентов вектора скорости.
Преобразования компонентов вектора скорости можно получить, пользуясь преобразованиями Лоренца:
![]()
![]()
![]()
8.10. Релятивистская масса, релятивистский импульс.
Из факта предельности скорости света следует, что тела могут двигаться только со скоростями, меньшими скорости света. Если на тело действует постоянная сила, то его ускорение пропорционально силе лишь при малых скоростях. С ростом скорости при неизменной силе ускорение начинает уменьшаться, что можно объяснить только возрастанием массы тела с ростом скорости.
Масса тела, движущегося со скоростью , равна:
![]()
![]()
Г![]() де
, - масса тела в системе, связанной
с ним, так называемая "масса покоя".
де
, - масса тела в системе, связанной
с ним, так называемая "масса покоя".
Соответственно, импульс тела определяется выражением:
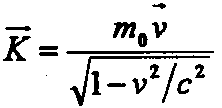
![]()
8.11. Релятивистское уравнение движения.
Релятивистское уравнение движения по внешнему виду совпадает с записью основного закона динамики Ньютона в общей формулировке:

![]()
Релятивистское уравнение динамики удовлетворяет преобразованиям Лоренца и, следовательно, общефизическому принципу относительности. Важно отметить, что в отличие от классического закона динамики в релятивистском случае сила и ускорение могут не совпадать по направлению:

![]()
Лишь в двух случаях, когда сила нормальна к вектору скорости или сонаправлена с ним, ускорение и сила по направление совпадают.
9. Неинерциальные системы отсчёта.
9.1. Силы инерции.
Как уже отмечалось, существуют такие системы отсчета, в которых ускорение тел вызывается не только действием сил, но и самим движением системы отсчета.
Рассмотрим поведение свободного тела, находящегося в покое относительно неподвижной системы. В этой системе выполняются законы Ньютона: равнодействующая приложенных к телу сил равна нулю и тело, как следствие, находится в покое. Если же другая система отсчета движется относительно первой с ускорением a, то в подвижной системе тело получает ускорение - а, равное по величине ускорению системы и противоположно ему направленное. Следовательно, в подвижной системе законы Ньютона не выполняются: равнодействующая приложенных сил равна нулю, а тело приобретает ускорение.
Ч![]() тобы
и в таких системах выполнялись законы
Ньютона, приходится вводить дополнительные
фиктивные силы, называемые силами
инерции. В рассмотренном примере в
подвижной системе вводится сила инерции:
тобы
и в таких системах выполнялись законы
Ньютона, приходится вводить дополнительные
фиктивные силы, называемые силами
инерции. В рассмотренном примере в
подвижной системе вводится сила инерции:
объясняющая появление ускорения тепа в подвижной системе отсчета. Т.е. сила инерции равна произведению массы тела на ускорение системы и противоположно ему направлена.
Если связать систему отсчета с ускоренно движущимся телом, то геометрическая сумма всех сил, приложенных к телу, включая силу инерции, равна нулю (принцип Даламбера).