

2.3.Вращательное движение тел .
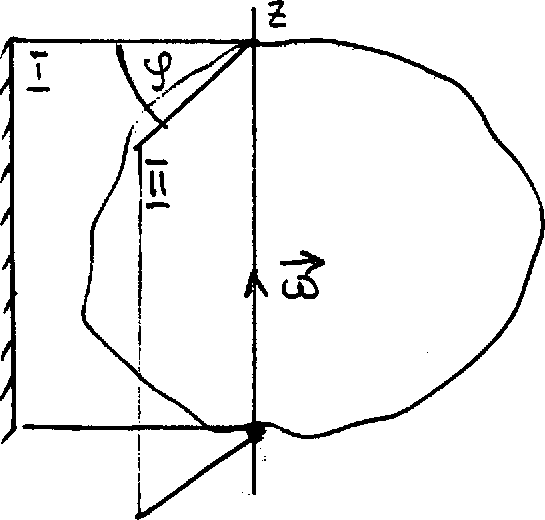 Рис.
10
Рис.
10
Вращательным называется такое движение твердого тела, при котором хотя бы две его точки остаются неподвижными в пространстве. Прямая, проходящая через неподвижные точки тела, называются осью вращения. При вращательном движении все точки тела движутся в параллельных плоскостях, описывая концентрические окружности, центры которых лежат на оси вращения.
Пусть тело вращается вокруг неподвижной оси Z (рис. 10). Для определения положения этого тела в пространстве через ось вращения проведем две плоскости: 1 - неподвижную и 2 - связанную с телом и вращающуюся вместе с ним. Положение тела задается углом между плоскостями (угловой координатой). Изменение угловой координаты задает угловое перемещение . Кинематический закон движения тела задан, если известна угловая координата в любой момент времени: = (t).
Быстрота вращения определяется угловой скоростью.
С
![]() редней
угловой скоростью называют величину:
редней
угловой скоростью называют величину:
![]()
а![]() мгновенной:
мгновенной:
д
![]() ля
определения
как вектора необходимо угол поворота
(угловое перемещение) также определять
как вектор. Вектором углового
перемещения называют вектор, направленный
вдоль оси вращения в ту сторону, откуда
вращение тела видно происходящим против
хода часовых стрелок. По такому
определению вектор угловой скорости
равен:
ля
определения
как вектора необходимо угол поворота
(угловое перемещение) также определять
как вектор. Вектором углового
перемещения называют вектор, направленный
вдоль оси вращения в ту сторону, откуда
вращение тела видно происходящим против
хода часовых стрелок. По такому
определению вектор угловой скорости
равен:
В случае вращения тела, показанном на рис. 10, вектор угловой скорости направлен вверх вдоль оси вращения.
В![]()
![]() ектором
среднего углового ускорения называют
вектор
ектором
среднего углового ускорения называют
вектор
а![]()
![]() мгновенного
мгновенного
Легко видеть, что при ускоренном вращении твердого тела вектор углового ускорения направлен вдоль оси вращения в ту же сторону, что и вектор угловой скорости, а при замедленном - вдоль оси вращения противоположно вектору угловой скорости.
Движение отдельных точек вращающегося твердого тела.
Х![]()
![]()
![]()
![]() отя
все точки вращающегося тела имеют
одинаковые и кинематические
отя
все точки вращающегося тела имеют
одинаковые и кинематические
характеристики их движения ( и ) различаются. Предположим, что произвольная точка вращающегося тела находится на расстоянии г от оси вращения (рис.11).
 рис.11
рис.11
 За промежуток
времени t
проходит по своей траектории путь S
. Средняя скорость точки при этом равна:
За промежуток
времени t
проходит по своей траектории путь S
. Средняя скорость точки при этом равна:
а![]()
 мгновенная:
мгновенная:
С учетом направлений векторов угловой и
линейной скорости, а также радиус-вектора
рассматриваемой точки, получим:
учетом направлений векторов угловой и
линейной скорости, а также радиус-вектора
рассматриваемой точки, получим:
![]()
У![]()
![]() скорение
отдельных точек вращающегося твердого
тела удобно определять по отдельным
его составляющим at,
an:
скорение
отдельных точек вращающегося твердого
тела удобно определять по отдельным
его составляющим at,
an:

![]()
![]()
П![]() олное
ускорение точки равно
олное
ускорение точки равно
 рис 12
рис 12
Как видно из приведенных соотношений, полное ускорение и отдельные его составляющие зависят от расстояния r до оси вращения. Направление вектора ускорения при таком представлении определяется углом отклонения вектора ускорения от радиуса вращения (рис. 12).
И з
рис. 12 видно, что
з
рис. 12 видно, что
![]()
Таким образом, угол отклонения вектора полного ускорения от радиуса вращения одинаков для всех точек тела.