

-
Кинетическая энергия твёрдого тела для различных типов движения.
1.Поступательное движение
![]() (264)
(264)
2.Вращательное движение
![]() (265)
(265)
3.Плоское движение тела
В любой момент времени плоское движение можно представить, как вращение вокруг мгновенного центра вращения, пусть О -мгновенный центр вращения, а т. С - центр с масс тела. Тогда:
![]() (266)
(266)
где:
![]() и
и
![]() - моменты инерции тела относительно
осей, проходящих через центр масс и
мгновенный центр вращения,
- моменты инерции тела относительно
осей, проходящих через центр масс и
мгновенный центр вращения,
![]() - расстояние между осями,
- расстояние между осями,
![]() .
- скорость центра масс поступательной
части движения),
.
- скорость центра масс поступательной
части движения),
![]() (омега)
- угловая скорость вращения вокруг оси,
проходящей через центр масс.
(омега)
- угловая скорость вращения вокруг оси,
проходящей через центр масс.
2. Вращательное движение
Свободные оси вращения
Момент импульса тела в произвольном случае его вращения не совпадает по направлению с вектором угловой скорости вращения. Тем не менее, существует такие оси, при вращении вокруг которых момент импульса и угловая скорость по направлению совпадают. Такие оси называются главными осями инерции (свободными осями вращения). Таких осей в каждом теле три, все они взаимноперпендикулярны и проходят через центр масс тела, поэтому их удобно принимать в качестве системы отсчета для каждой из этих осей
![]() ,
,![]() ,
,![]() .
.
В
случае произвольного по форме тела
легко показать, что
![]() и
и
![]() (омега)
не совпадает по направлению (рис. 62).
(омега)
не совпадает по направлению (рис. 62).
Кинетическая энергия тела при таком вращении может быть представлена суммой энергий вращения вокруг трех главных осей:
![]()
или:
или:
![]()

или:
![]()
Направление
векторов
![]() и
и
![]() можно указать заданием направляющих
косинусов, например:
можно указать заданием направляющих
косинусов, например:

очевидно,
что направления
![]() и
и
![]() совпадают в том случае, если:
совпадают в том случае, если:
![]() (267)
(267)
Твердое
тело, отвечающее условию (267), называется
шаровым волчком. Твердое тело, у которого![]() ,
называется симметричным волчком с осью
симметрии
,
называется симметричным волчком с осью
симметрии
![]() .
.
Твердое
тело, у которого все три главных момента
инерции различны, называет несимметричным
волчком
![]() .
.
СВОБОДНОЕ ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА
Свободным называют такое вращение тела, при котором сумма моментов внешних сил, приложенных к телу, равна нулю:
![]()
Отсюда следует, что при свободном вращении:
![]()
![]()
Рассмотрим
свободное вращение симметричного волчка
с осью симметрии
![]() .Кинетическая
энергия для него равна:
.Кинетическая
энергия для него равна:

В этом выражении первое слагаемое постоянно, следовательно, постоянно и второе, т.е.:
![]() (268)
(268)
Учитывая,
что
![]() получаем:
получаем:
![]() (269)
(269)
Написав выражение для кинетической энергии в виде:
![]()
делаем вывод, что:
![]() (270)
(270)
наконец, кинетическую энергию представим в виде:
![]() (271)
(271)
где
- угол между векторами
![]() и
и
![]() .Из
(271) следует, что,
.Из
(271) следует, что,
![]() (272)
(272)
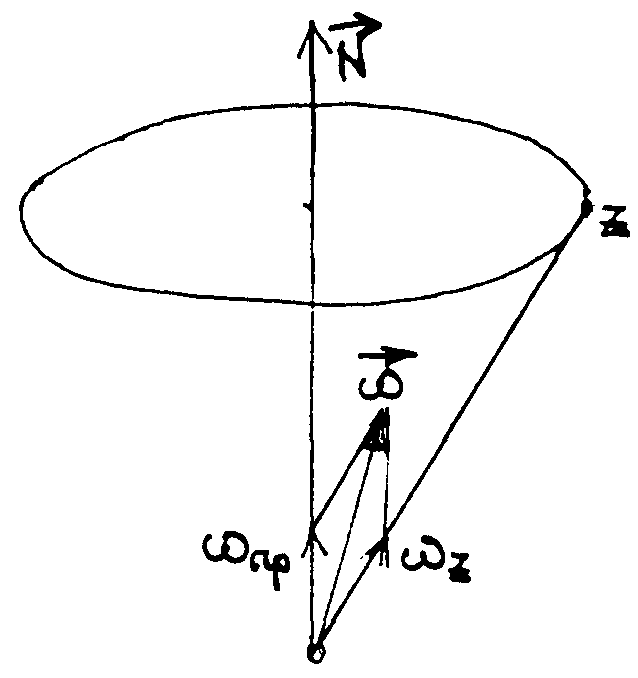
Учитывая
(269), (270), (271) ,(272) свободное вращение тела
можем представить как вращение оси
симметрии тела вокруг неподвижного
направления
![]() .
При этом относительное расположение
.
При этом относительное расположение
![]() ,
,
![]() и
и
![]() со временем сохраняется (рис.53). Такое
вращение при отсутствии моментов внешних
сил называется регулярной прецессией.
Тело вращается вокруг оси симметрии со
скоростью
со временем сохраняется (рис.53). Такое
вращение при отсутствии моментов внешних
сил называется регулярной прецессией.
Тело вращается вокруг оси симметрии со
скоростью
![]() ,
a сама ось описывает коническую
поверхность, вращаясь вокруг неподвижного
направления
,
a сама ось описывает коническую
поверхность, вращаясь вокруг неподвижного
направления
![]() с угловой скоростью прецессии
с угловой скоростью прецессии
![]() .
.
(рис. 63)
Т.
o . для вращающегося тела можно выделить
три оси - момента импульса., угловой
скорости и оси симметрии. Существенно,
что относительное расположение этих
осей зависит от величины угловой скорости
вращения тела вокруг оси симметрии
![]() .
Несложно доказать, что при очень
быстром вращении тела
.
Несложно доказать, что при очень
быстром вращении тела
![]() все три направления практически сливаются
в одно. Эта особенность быстро вращающихся
тел лежит в основе элементарной теории
гироскопов.
все три направления практически сливаются
в одно. Эта особенность быстро вращающихся
тел лежит в основе элементарной теории
гироскопов.