

1.3.Вектор ускорения.

![]()
Вектором ускорения называют вектор, определяющий быстроту и направление изменения вектора
скорости. Аналогично определениям для вектора скорости вводятся понятия среднего и мгновенного
у скорения:
скорения:
![]()
При движении точки по произвольной траектории вектор изменения скорости Δ и, следовательно, вектор ускорения направлены в сторону вогнутости траектории независимо от того, увеличивается или уменьшается величина скорости (рис. 4, 5):

Рис. 4. Ускоренное движение Рис. 5. Замедленное движение
Как видно из рисунков, в обоих случаях вектор d направлен в сторону вогнутости траектории. При ускоренном движении он отклоняется в сторону движения, при замедленном - в противоположную
Для определения мгновенного ускорения надо рассматривать бесконечно малые перемещения, т.е. векторы скорости 1 и 2 в соседних точках траектории. Поэтому вектор ускорения лежит в плоскости, содержащей касательную к траектории в данной точке и прямую, параллельную касательной в соседней точке траектории. Такая плоскость называется соприкасающейся. Поэтому наряду с представлением вектора ускорения компонентами
![]()
![]()
можно рассматривать составляющие вектора в соприкасающейся плоскости (т.е. только две компоненты). Для определения этих составляющих в любой точке траектории проводят соприкасавшуюся плоскость и в ней две оси - нормальную On. в сторону вогнутости траектории и касательную Ot по касательной к траектории. Изменение скорости и, соответственно, ускорение можно рассматривать в проекциях на эти оси (рис. 6).
Двигаясь вдоль траектории, за промежуток времени t точка проходит путь S скорость ее изменяется от до 1, при этом 1 составляет угол (альфа) с осью Ot. По определению мгновенного ускорения:
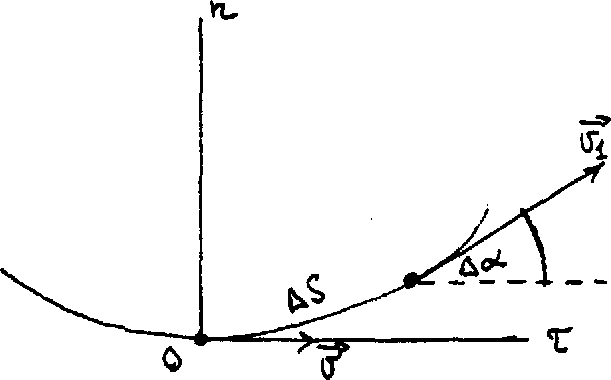 Рис.
6
Рис.
6

![]()
![]()
П![]() реобразуем
выражение предела, умножив и разделив
его на
и S:
реобразуем
выражение предела, умножив и разделив
его на
и S:
О тметим,
что при t=0
бесконечно убывает и пройденный путь,
и угол (S=0,
a=0).
При этом условии значения пределов
равны:
тметим,
что при t=0
бесконечно убывает и пройденный путь,
и угол (S=0,
a=0).
При этом условии значения пределов
равны:
![]()
Предел же называется кривизной траектории К. Кривизна траектории обратно
пропорциональна радиусу кривизны траектории:

С учетом этих замечаний выражение для
нормальной составляющей вектора
ускорения принимает вид
учетом этих замечаний выражение для
нормальной составляющей вектора
ускорения принимает вид
![]()
Для выяснения физического смысла ускорения рассмотрим два частных случая движения.
Р![]() авномерное
криволинейное движение (V=const, k<>0). В
этом случае, как видно из (14) и (16),
авномерное
криволинейное движение (V=const, k<>0). В
этом случае, как видно из (14) и (16),
Н![]() еравномерное
прямолинейное движение (V<>соnst , K=0).
При таком движении
еравномерное
прямолинейное движение (V<>соnst , K=0).
При таком движении
Следовательно, касательная составляющая ускорения определяет изменение вектора скорости по величине, а нормальная - по направлению.
2. Кинематика твердого тела.
Для нахождения кинематического закона движения, т.е. r=r(t) или х = х(t), у=y(t), z=z(t) надо найти закон движения каждой точки тела, т.е. решить бесконечно большое число уравнений, что сопряжено с непреодолимыми математическими трудностями.
Однако особенности самого твердого тела и особенности его движения могут значительно упростить задачу.