

15. Функциональные потенциометры
Функциональные потенциометры, являющиеся носителями заданной программы или заданной функции в системах автоматики, характеризуются определенной зависимостью
Rx = f(x). Зависимость Uвых = φ(x) так же, как и у линейных потенциометров, при сопротивлении нагрузки Rн, соизмеримом с сопротивлением потенциометра, будет отличаться от зависимости Rx = f(x).
Поскольку при разработке систем автоматики заданным является зависимость
Uвых
= φ(x),
то при расчете потенциометра необходимо
по заданной функции и принятому
коэффициенту нагрузки![]() найти функцию Rx
= f(x)
и по этой функции определить необходимый
профиль каркаса потенциометра.
найти функцию Rx
= f(x)
и по этой функции определить необходимый
профиль каркаса потенциометра.
Приближенно можно принять, что высота каркаса Н функционального потенциометра меняется пропорционально производной от функции Rx = f(x), т.е.
![]() .
.
Для наиболее часто встречающихся функций форма каркасов потенциометров приведена на рис.13.
Вследствие сложности
намотки профильных потенциометров и
невозможности получения профиля при
![]() в большинстве случаев вместо профильных
потенциометров применяют к ступенчатые.
в большинстве случаев вместо профильных
потенциометров применяют к ступенчатые.
Это замена основана
на том, что кривая Rx
= f(x)
заменяется отрезками прямых
(аппроксимируется) таким образом, чтобы
максимальное значение ошибки
![]() не превышало определенной величины.
не превышало определенной величины.
При этом функциональный потенциометр как бы делится на несколько линейных потенциометров.
16. Датчики перемещения с изменяющейся индуктивностью (индуктивные датчики)
В
данной группе датчиков изменяющимся
параметром управляемой цепи является
индуктивное сопротивление Х =
![]() ,
где
,
где
![]() -
частота переменного тока; Lx
– индуктивность датчика, изменяющаяся
при перемещении подвижной системы
датчика.
-
частота переменного тока; Lx
– индуктивность датчика, изменяющаяся
при перемещении подвижной системы
датчика.
Эти
системы применяются лишь на переменном
токе, величина которого будет изменяться
при изменении Х =
![]() .
.
Простейшим
датчиком данной группы является дроссель
и изменяющимся воздушным зазором
![]() или изменяющейся площадью его поперечного
сечения (Sв
= var) (рис.14).
или изменяющейся площадью его поперечного
сечения (Sв
= var) (рис.14).
Индуктивность дросселя при ненасыщенном магнитопроводе может быть выражена следующей формулой:
где
![]() -
число витков обмотки дросселя;
-
число витков обмотки дросселя;
![]() - магнитное
сопротивление сердечника и якоря;
- магнитное
сопротивление сердечника и якоря;
![]() -
длина воздушного зазора, м;
-
длина воздушного зазора, м;
Sв – площадь поперечного сечения воздушного зазора, м2.
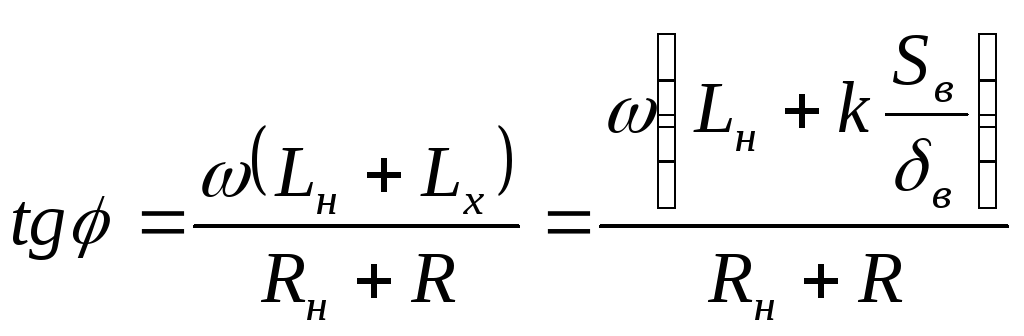
Для тока и тангенса угла сдвига фаз в цепи нагрузки имеем:
![]()
![]() İ
=
İ
=
 ,
,
 ,
,
где R – активное сопротивление обмотки дросселя;
Zн
= Rн + ј![]() - полное (комплексное) сопротивление
нагрузки.
- полное (комплексное) сопротивление
нагрузки.
Таким
образом, при изменении длины
![]() или площади поперечного сечения Sв
– воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения тока.
или площади поперечного сечения Sв
– воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения тока.
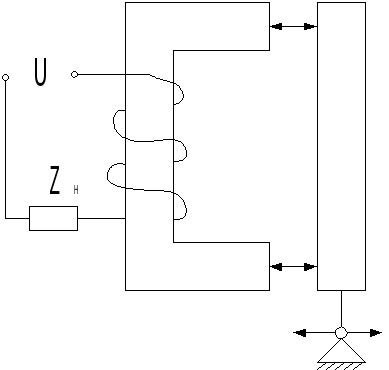
Рис.14
Обычно применяют дифференциальную или мостовую схемы включения датчика.
Дифференциальная схема включения подобной системы с двумя дросселями показана на рис.15-а, а мостовая - на рис.15-б.
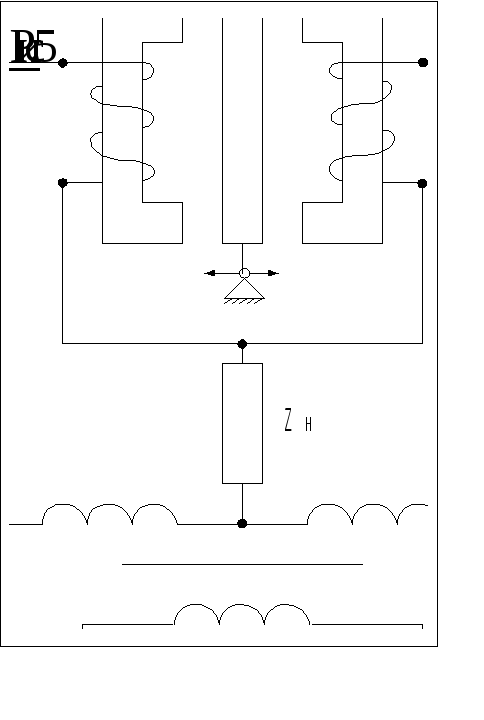

а) б)
0
Рис.15
Пример 1:
Определить индуктивность датчика, имеющего 18000 витков, = 5мм и площадь торца магнитопровода 400 мм2
![]()
L = 2 : 5*3.14*180002*400*10-10 =1603 Гн
Пример 2:
Определить число витков и диаметр провода, который надо намотать на датчик с площадью торца магнитопровода 180 мм2,чтобы при воздушном зазоре = 3мм по обмотке протекал ток 100 мА. Допустимая плотность тока jдоп=2,5 А/мм2, датчик питается от сети
220 В, f = 100 Гц.
Для того, чтобы определить число витков и диаметр провода, нужны формулы:
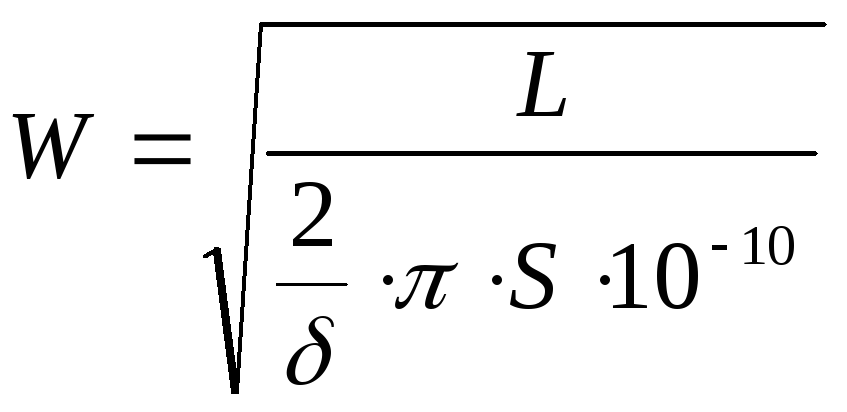 ,
, ![]() ,
, ![]() ,
, ![]()
.
![]() ,
, 
![]() мм
мм