

9. Элементы с непосредственным преобразованием
Элементы по своему устройству могут быть разделены на элементы с непосредственным преобразованием и элементы промежуточными преобразованиями. В элементах с непосредственным преобразованием изменение управляющего (входного) параметра х непосредственно вызывает изменение выходного параметра y. Наиболее часто выходным параметром y в непрерывных электрических управляемых процессах является напряжение, ток, фаза или частота. Для этого необходимо, чтобы под воздействие входного параметра x происходило изменение сопротивление Rx, индуктивности Lx, ёмкости Cx или ЭДС Ex. Элементы с изменяющимися параметрами Rx, Lx и Cx относятся к элементам модуляторам, элементы с изменяющейся Eх– к элементам - генераторам.
Датчики с непосредственным преобразованием могут работать и в релейном режиме, т.е. при достижении заданного значения управляющего (входного) параметра х=хсраб скачком изменять управляемый (выходной) параметр у от у=умин до у=умакс. Релейный режим работы может быть получен путём введения в схему положительной обратной связи. Примером может быть магнитный усилитель при работе в релейном режиме.
10. Согласование характеристик и основные параметры элементов с промежуточными преобразованиями
При устройстве
реле и датчиков с промежуточным
механическим преобразованием
воспринимающие органы, получая энергию
от внешних входных воздействий, создают
тяговые силы. Зависимость тяговых сил
от хода подвижных частей воспринимающих
органов x и величины
внешнего входного воздействия Х
называют тяговой характеристикой
![]() .
При своем перемещении подвижные частиц
встречают сопротивление, создаваемое
силами реакции исполнительных и
промежуточных органов
.
При своем перемещении подвижные частиц
встречают сопротивление, создаваемое
силами реакции исполнительных и
промежуточных органов
![]() (рис.3).
(рис.3).
Обычно усилия
реакции
![]() приводят к точке, где действуют тяговые
силы и зависимость (механических)
приведенных усилий реакции исполнительных
и промежуточных органов от хода подвижных
частей воспринимающих органов
приводят к точке, где действуют тяговые
силы и зависимость (механических)
приведенных усилий реакции исполнительных
и промежуточных органов от хода подвижных
частей воспринимающих органов
![]() называют механической (нагрузочной)
характеристикой. В зависимости от
согласования тяговых механических
характеристик элемента можно получить
непрерывную или релейную характеристики
управления.
называют механической (нагрузочной)
характеристикой. В зависимости от
согласования тяговых механических
характеристик элемента можно получить
непрерывную или релейную характеристики
управления.
На рис.3,в приведены тяговые и механические характеристики для реле.
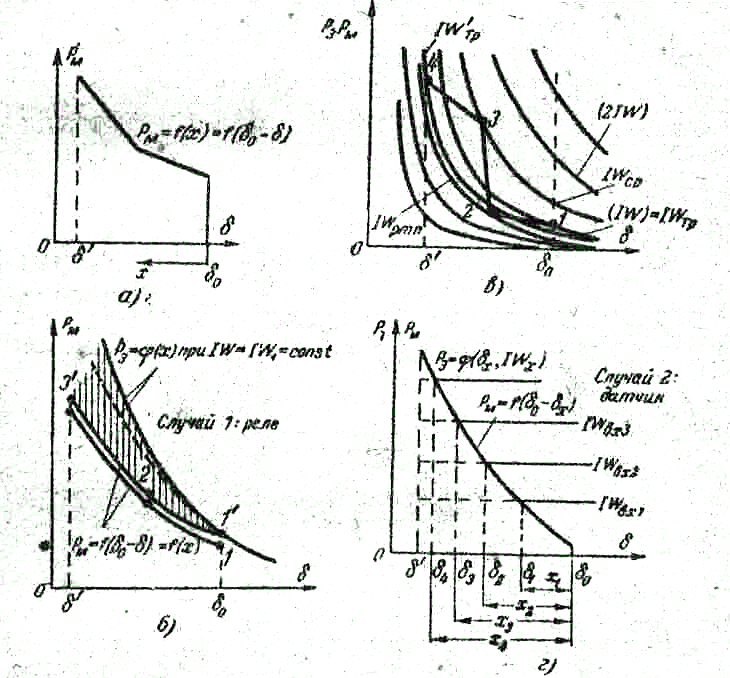
Рис.3
Для правильной работы реле необходимо, чтобы тяговая характеристика при рабочем значении воздействующей (входной) величины (тока, напряжения и т. д.) лежала во всех точках выше механической, т. е.
![]()
при
![]() <x<
<x<![]() ,
где
,
где
![]() - начальное, а
- начальное, а
![]() - конечное значение воздушного зазора
, х - перемещение.
- конечное значение воздушного зазора
, х - перемещение.
При некотором
значении воздействующей входной
величины, например, точка
![]() ,
значение тяговых сил
,
значение тяговых сил
![]() станет равным механическим
станет равным механическим
![]() при
при
![]() и подвижная система при необходимом
увеличении
и подвижная система при необходимом
увеличении
![]() начнет свое движение. Это значение
начнет свое движение. Это значение
![]() носит название величины (параметра)
трогания реле при срабатывании (тока,
н. с., напряжения или мощности трогания
- для электрических реле; температуры
трогания - для тепловых реле и т. п.).
носит название величины (параметра)
трогания реле при срабатывании (тока,
н. с., напряжения или мощности трогания
- для электрических реле; температуры
трогания - для тепловых реле и т. п.).