

11.Схемы формирования электрических сигналов при наличии элементов–генераторов
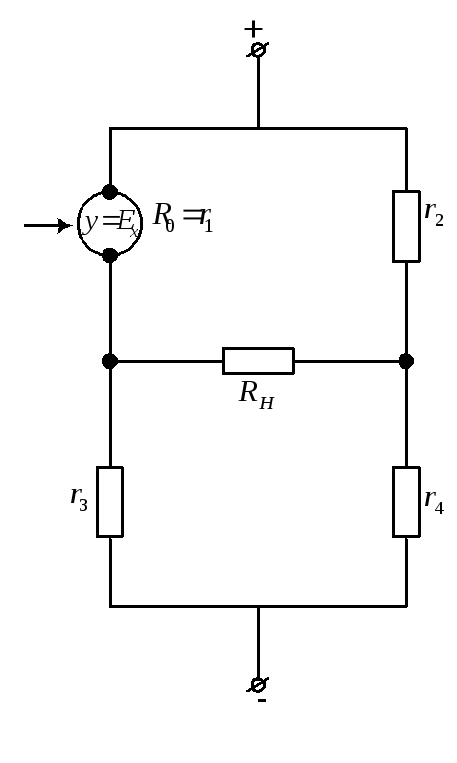
Простейший случай включения элементов-генераторов (Е =var) показан на рис.4. Величина тока в цепи нагрузки

![]() ,
,
Рис.4
где R0 – внутреннее сопротивление элемента;
![]() -
суммарное сопротивление соединительных
проводов;
-
суммарное сопротивление соединительных
проводов;
RН- сопротивление нагрузки (приемника);
![]() .
.
Величина напряжения на нагрузке при этом будет равна:
![]() ,
,
а выходное напряжение элемента-генератора Ux=Ex – IR0 . Зависимость Ux=f(Ex, I) называется выходной (или нагрузочной) характеристикой элемента генератора.
При
«приемнике напряжения»
![]() и
и
![]() .
При «приемнике тока» обычно берется
.
При «приемнике тока» обычно берется
![]() и
и
![]() и
и
![]() .
.

Рис.5
Величина мощности, выделяемой в нагрузке, равна:
 .
.
Наибольшее значение РН отвечает условию RН=R0∑ .
В компенсационной схеме (рис.5) значение тока в нагрузке (приемнике) равно:
![]() ,
,
где U0 – величина компенсационного напряжения;
rab - сопротивление между точками а и b схемы.
Напряжение на нагрузке RН равно
![]() .
.
12. Схемы формирования электрических сигналов при наличии элементов-модуляторов
В общем случае зависимость между током I и падением напряжения Ú на элементе-модуляторе
![]() , где
, где
![]() .
.
Здесь Х –
величина внешнего воздействия. Обычно
можно считать, что
![]() ,
,
где
![]() .
.
В случае, если
![]() ,
получим, что
,
получим, что
![]() не зависит от І и U
будет существовать линейная зависимость:
не зависит от І и U
будет существовать линейная зависимость:
![]() .
.
Для цепи, состоящей из последовательно включенных элементов модулятора и нагрузки, имеем
![]() или
или
![]() ,
,
следовательно,
или
при
![]()

 .
.
Для
построения схем формирования сигнала
существенно знать, как будет изменяться
напряжение и ток в цепи или угол сдвига
фаз
![]() ,
если сопротивление
,
если сопротивление
![]() (или индуктивность
(или индуктивность
![]() ,
или емкость
,
или емкость
![]() )
изменяет свое значение в функции х.
)
изменяет свое значение в функции х.
Имеем для тока в последовательной цепи (рис.7), что
 ,
,
Рис.7
где
 - эквивалентная э. д. с.1
- эквивалентная э. д. с.1
13. Схемы формирования электрических сигналов при мостовой схеме
В случае наиболее распространенной мостовой схемы включения (рис.8) справедливы следующие основные управления:
![]() ,
где
,
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
где Z5 – сопротивление измерительной диагонали;
I 5
– ток в измерительной диагонали.
5
– ток в измерительной диагонали.
14. Датчики перемещения
Датчики перемещения с изменяющимся активным сопротивлением (потенциометрические датчики)
Применяются в основном как датчики угловых и линейных перемещений.
Потенциометры используются в качестве делителей напряжения.
По виду зависимости между Rx (рис.11,) и величиной x перемещения движка (углом поворота α) различают линейные и функциональные потенциометры.
Линейные потенциометры
Линейные потенциометры весьма широко применяются в устройствах автоматики. Они характеризуются линейной зависимостью Rx = f(x) , которая изображает прямой линией (рис.12).
Зависимость выходного напряжения Uвых от напряжения U, питающего потенциометр, определяется соотношением величин сопротивлений нагрузки и потенциометра.

 Рис. 12 (3 - β ,
2 - β =10, 1- β = 5)
Рис. 12 (3 - β ,
2 - β =10, 1- β = 5)
Коэффициент
нагрузки
![]() ,
если Rн
>> R то
,
если Rн
>> R то
![]() ,то
током нагрузки можно пренебречь, и
зависимость Uвых
=f (x)
будет также линейной (см. рис.12), если β
уменьшить то линейность нарушится,
самая большая погрешность достигает
при нахождении движка в среднем положении.
,то
током нагрузки можно пренебречь, и
зависимость Uвых
=f (x)
будет также линейной (см. рис.12), если β
уменьшить то линейность нарушится,
самая большая погрешность достигает
при нахождении движка в среднем положении.
Если движок потенциометра перемещать по всей его длине в процессе работы, то расчет такого потенциометра нужно вести на максимальную погрешность, которая определяется выражением:
![]() (8.1)
(8.1)
Потенциометрические датчики для измерения угловых перемещений характеризуются следующими основными электрическими и конструктивными величинами:
R – полное сопротивление намотки потенциометра;
Р – допустимая мощность, рассеиваемая потенциометром;
ρ – удельное сопротивление материала провода намотки (константан 0,49 Ом*мм2/м, нихром 1,08 Ом*мм2/м);
d – диаметр провода намотки без изоляции;
dи - диаметр провода намотки с изоляцией;
j – допустимая плотность тока;
δв
– разрешающая способность потенциометра,
т. е величина прироста сопротивления(относительных
единицах или процентах) при перемещении
щетки на один виток;
![]() принимается обычно не более 0,2 - 0,25 %;
принимается обычно не более 0,2 - 0,25 %;
α – рабочий угол поворота щетки потенциометра; в однооборотных потенциометрах обычно а = 330;
D – средний диаметр окружности каркаса;
L – рабочая длинна каркаса (по окружности);
n – число витков;
τ – шаг намотки;
l – длина витка намотки;
d – толщина каркаса потенциометра;
|
|
|
|
|
|
|
|
|
|
|
Расчетные формулы:
![]() ; (8.2)
; (8.2)
l = 2(H + b); (8.3)
![]() ; (8.4)
; (8.4)
![]() ; (8.5)
; (8.5)
d
=
![]() мм; (8.6)
мм; (8.6)
![]()
(8.7)