

Глава 6. Виды воздействий на деталь (Connector)
![]() Translational
Spring-Damper
Translational
Spring-Damper
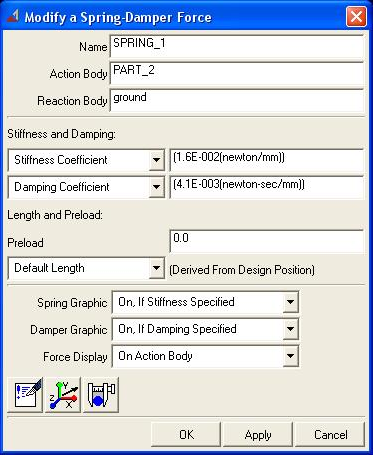
Создает нелинейный упругодемпфирующий элемент. В простейшем случае используется линейный закон. При этом указываются две величины: жесткость пружины K (Stiffness Coefficient) и коэффициент затухания C (Damping Coefficient). Если С достаточно велико, пружина перестанет деформироваться тогда, когда достигнет точки равновесия. Деформации, скорости их изменения и другие параметры измеряются от длины ненагруженной
пружины.
Деформация в точке равновесия D=K/(m*g+preload),
где K- жесткость пружины;
m - масса груза; g – ускорение свободного падения; Preload задает силу в Н, которая постоянно действует на пружину. Это эквивалентно подвешиванию к ней какой-либо массы. Здесь возможен случай отрицательной массы!
Length at preload задает длину ненагруженной пружины, которая складывается из Lэ (длины той пружины, которая изображена на экране) и некой части Lн = Length at preload – Lэ. Если Length at preload > Lэ, то пружина сжата в Length at preload/Lэ раз и при демонстрации будет расширяться. Иначе наоборот.
Если требуются нелинейные характеристики, то значения практически всех величин можно вводить в виде функций. Кроме того, коэффициент жесткости можно вводить в виде сплайна Сила = f(деформация), а коэффициент демпфирования – в виде сплайна
Сила = f(скорость деформации).
![]() Gravity
– управляет гравитацией. Дублирует
команду Settings/Gravity…
Gravity
– управляет гравитацией. Дублирует
команду Settings/Gravity…
![]() Force
( Single Component)
– создает сосредоточенную силу,
приложенную к какой-либо точке детали.
Сила может иметь любое направление.
Величина силы может быть как функцией,
так и константой.
Force
( Single Component)
– создает сосредоточенную силу,
приложенную к какой-либо точке детали.
Сила может иметь любое направление.
Величина силы может быть как функцией,
так и константой.
Если задается зависимость силы от перемещения, достаточно задать лишь точку
(To marker) перемещение которой будет учитываться. При этом перемещение учитывается от нулевого уровня, т. е. от оси координат. Чтобы этого избежать, нужно вычесть из заданного перемещения начальную координату точки. Сила может находиться в различных положениях при движении тела:
а) On one body, Fixed in Space – означает, что вектор силы всегда остается одинаковым по направлению. Он может лишь перемещаться в плоскости вместе с телом, оставаясь параллелен сам себе. Задается тремя маркерами. Маркер_1 – точка приложения силы на теле, Маркер_2 – точка начала вектора силы (пространственно совпадает с Маркер_1), Маркер_3 – находится на ведущем теле (в данном случае на «земле»).
б) On one body, Moving with Body – вектор силы сохраняет свое положение относительно тела, поворачиваясь вместе с ним. Маркер_3 находится на теле в месте нахождения Маркер_1.
в) On one body, Moving with Other Body – вектор силы движется вместе с телом, но ориентацию сохраняет относительно ориентации другого тела, называемого ведущим. Маркер_3 на ведущем теле. Здесь необходимо указать ведущее тело.
г) Between Two Bodies In Line-Of-Sight – сила связывает между собой два тела, при этом они воспринимают ее действие совместно. Сила всегда направлена по прямой, соединяющей маркеры на телах, к которым она приложена.
![]() Torsion
Spring
Torsion
Spring
Торсионный нелинейный упругодемпфирующий элемент предназначен для использования во вращательных соединениях, для которых он действует аналогично обычной пружине при поступательном движении. У него имеются следующие параметры:
Stiffness Coefficient (коэффициент жесткости), который в данном случае измеряется в Н*мм/градус. Если вам известна крутильная жесткость элемента в Н*мм, то достаточно
будет поделить ее на величину 1 радиана в градусах, т. е. приблизительно на 57,3.
Damping Coefficient (коэффициент демпфирования), здесь измеряется в Н*мм*с/градус. Разумеется, все размерности даны по умолчанию и с изменением системы размерностей также изменяются.
Special Forces: Aerodynamic/Hydrodynamic (отключено в ADAMS 2005)
Задает аэродинамические силы, действующие на крыло, для чего вводятся параметры воздуха и крыла. Можно выбрать несколько стандартных крыльев разных самолетов.
![]() Applied
Force: Torque ( Single Component)
Applied
Force: Torque ( Single Component)
Создает момент вокруг одной оси, который можно приложить в любом месте.
![]() Bushing
Bushing
-
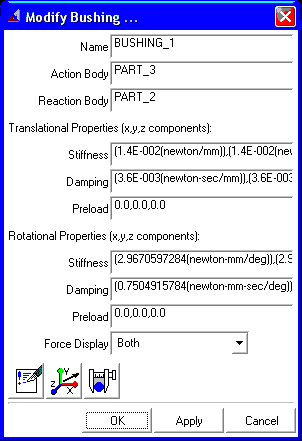
Как видно, это соединение напоминает резинку, положенную между двумя телами. Как бы они не двигались, для каждой оси имеются свои коэффициенты жесткости и демпфирования. Еще можно представить это соединение как набор из шести пружин, по одной на каждое возможное движение (степень свободы). Хорошо подходит для моделирования опор. Позволяет производить расчет конструкции на вибрацию. Однако при динамическом анализе вносит погрешности за счет своей податливости тем большие, чем меньше жесткость и выше демпфирование соединений.
Stiffness – величины жесткостей по осям.
Damping – величины демпфирования по осям.
![]() Tire
Tire
Позволяет создавать колеса различных типов. Это требуется для расчетов сил и моментов в процессе разгона, торможения, поворота автомобиля. Для соединения характерно задание необходимых параметров в виде внешних файлов свойств.
Tire содержит следующие модули, которые могут быть включены в дополнение к
ADAMS/Solver. Они могут использоваться в ADAMS/Car, ADAMS/Aircraft, ADAMS/View, встраиваясь в конструкцию моделей.
а) Foundation (Основной модуль): Расчет сил в точке контакта с дорогой, используя граничные условия.
б) Handling (Модуль управления): Foundation + модель колеса Pacejka.
в) Durability (Модуль устойчивости): Handling + трехмерный контакт « шина-дорога ».
Файл свойств колеса (точнее шины) вы можете взять из модулей (см. выше), получить от фирм производителей колеса или тестирующих фирм или создать самостоятельно. Последнее для простых типов вроде Fiala. Файл свойств дороги также можно взять стандартный, а можно создать свой. Профиль дороги в Durability может учитывать: выбоины, бордюр, бельгийский блок. Файлы дорог и шин, данные в ADAMS/Car не воспринимаются в ADAMS/View!
Fiala – это стандартная модель, которую поставляют с Foundation. Ее основные допущения:
а) прямоугольное пятно контакта;
б) равномерное распределение давления по площадке контакта;
в) колесо создано как брус на эластичной основе;
г) Chamber-угол (угол установки камеры) не влияет на силы.
TYDEX Standard Tire Interface (STI) – это обыкновенная подпрограмма FORTRAN, вызываемая для модели колеса. ADAMS/Tire использует TYDEX STI модели для того, чтобы ваша tire data могла использоваться в различных расчетных приложениях (analysis applications).
![]() Applied
Force: Force Vector ( 3-Component Force)
Applied
Force: Force Vector ( 3-Component Force)
Задает проекции силы на три оси.
![]() Field
Field
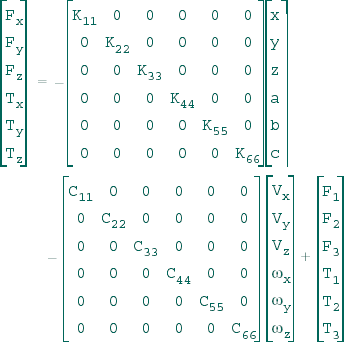
Задает матрицу жесткостей между двумя элементами. В общем, аналогична Bushing, но здесь связь идет не между точками, а между телами:

![]() Modal
Force
Modal
Force
Модальная сила (modal force) или MFORCE применяется для приложения силы к одному, нескольким или всем узлам деформируемого тела. Амплитуда силы может зависеть от времени и положения, и даже от переменной окружения (state variable). Примерами применения модальной силы являются моделирование давления на подшипники шейки вала, расчет магнитной индукции или моделирование флаттера.
Модальные силы – это специальный класс сил, называемых распределенной нагрузкой, которая может быть приложена только к деформируемым телам.
ADAMS/View обеспечивает две опции при приложении MFORCES к гибкому телу. Обе опции требуют предварительных настроек во внешних приложениях для определения модальных сил:
I. Масштабирование нагрузок в матрице модальных нагрузок гибкого тела. Эта опция может быть использована в ADAMS/View на деформируемых телах, если при создании модального нейтрального файла (MNF) в него была заложена информация о модальных нагрузках.
II. Задание модальных сил с помощью пользовательских подпрограмм (user defined subroutine). Эта опция обеспечивает больше возможностей для задания модальных сил.
Чтобы использовать это преимущество, вам необходимо изучить алгоритм MFOSUB, который создается в ADAMS/Solver.
К деформируемому телу может быть приложено несколько модальных сил. Для каждой модальной силы, приложенной к гибкому телу, в центре локальной системы координат тела отображается специальная иконка. Вы можете переместить модальную силу с одного гибкого тела на другое.
Опции диалогового окна Create Modal Force:
|
Действие |
Процедура |
|
Задание имени MFORCE |
В текстовом поле Force Name введите имя создаваемой модальной силы. По умолчанию MFORCE_1. |
|
Задание гибкого тела, к которому прикладывается MFORCE |
В текстовом поле Flexible Body введите имя деформируемого тела. |
|
Приложение результирующей реакции модальной силы к части |
Если необходимо, в поле Reaction Part введите имя внешней части. Если вы введете имя части, ADAMS/View автоматически свяжет созданный плавающий маркер (floating marker) с этой частью при создании MFORCE. ADAMS/View обеспечивает совпадение маркера с расчетной координатной системой деформируемого тела в процессе расчета. Таким образом, для задания точки реакции существует плавающий маркер. Кроме того, поскольку плавающий маркер не может быть задан на гибком теле, реакционная часть может быть только твердым телом.
Примечание: Вы можете использовать команду Info, чтобы увидеть плавающий маркер, который ADAMS/View создает, когда вы определяете реакционную часть. |
|
Выберите, как вы желаете задать модальную силу |
Выберите один из следующих способов: а) Function – выбирается в случае модальной нагрузки и масштабной функции MFORCE. Обратите внимание, что вы не можете выбрать Function, когда задаете MFORCE для деформируемого тела, которое не содержит информации о случаях модального нагружения в связанном с телом MNF. б) Subroutine – задает один или больше пользовательских параметров для передачи в пользовательскую подпрограмму MFOSUB и позволяет задать уникальный индификационный номер для этой модальной силы. При использовании Subroutine вам необходимо включить в ADAMS/Solver вашу версию MFOSUB, которая определяет величину модальной силы. Вы можете также задать альтернативную библиотеку и имя пользовательской подпрограммы в текстовом поле Routine. |
Если вы задаете модальную силу для тела с информацией о случае модального нагружения, вы можете задать:
Load Case – позволяет вам выбрать случай модального нагружения из списка. Список случаев модального нагружения создается в MNF.
Scale Function – позволяет задать математическое выражение для масштабного коэффициента, используемого для данного случая модального нагружения.
![]() Applied
Force: Torque Vector (3-Component Torque)
Applied
Force: Torque Vector (3-Component Torque)
Задает проекции моментов относительно всех осей.
![]() Massless
Beam – балочная сила
Massless
Beam – балочная сила
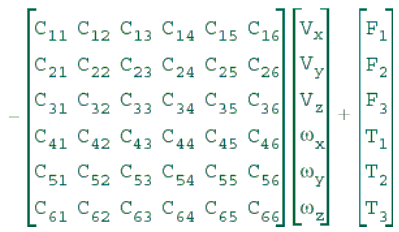
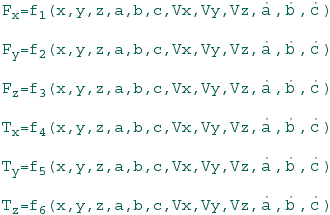
Создает силу между маркерами двух различных деталей, действующую по заданному направлению. Моделирует соединение двух деталей участком гибкой балки произвольного сечения:

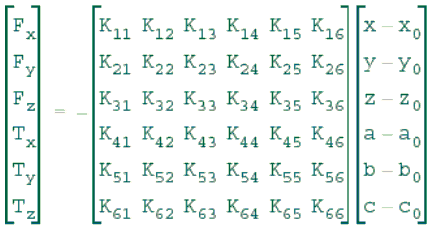
Матричное уравнение ADAMS/Solver, эквивалентное данной системе:

Основные параметры силы задаются в следующей таблице:
-
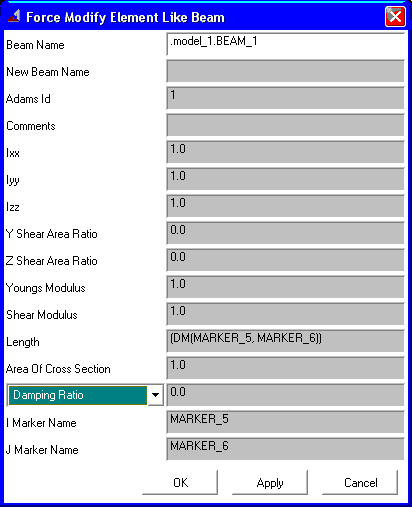
Beam Name – полное имя соединения.
Length – независимый параметр, а именно: расстояние между двумя точками.
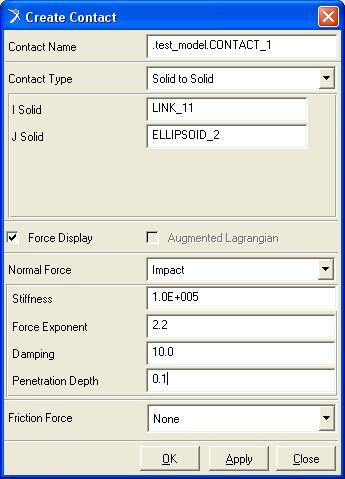
![]() Contact
Contact
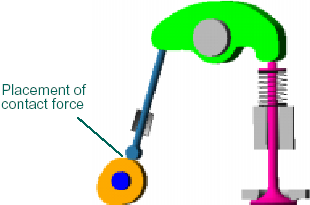
Позволяет задавать реакцию деталей на их соприкосновение. Для этого нужно выбрать два тела, задать необходимые коэффициенты, после чего геометрии начинают взаимодействовать друг с другом как реальные объекты: отскакивать при ударе, передавать импульс и кинетическую энергию.
а) Взаимодействие Restitution представляет собой абсолютно упругий удар.
Restitution Coefficient (0…1) – показывает, какая часть энергии возвращается телу при ударе.
Penalty – жесткость контакта, при превышении которой два тела начнут проходить друг через друга. Также она является «штрафом» - при ее увеличении возрастает точность восстановления энергии.
Когда Вы выбираете Augmented Lagrangian, ADAMS/View использует итерационное усовершенствование для обеспечения минимального проникновения между телами. Эта функция также гарантирует, что величина нормальной силы относительно нечувствительна к жесткости. Большое значение жесткости гарантирует, что проникновение одной геометрии в другую будет малым. Однако большие значения вызывают трудность численного интегрирования. Значение 1E6 соответствует системам, смоделированным в кг-мм-c.
|
|
б) Impact – удар. Описывается следующим уравнением:
если
где
|
![]() -
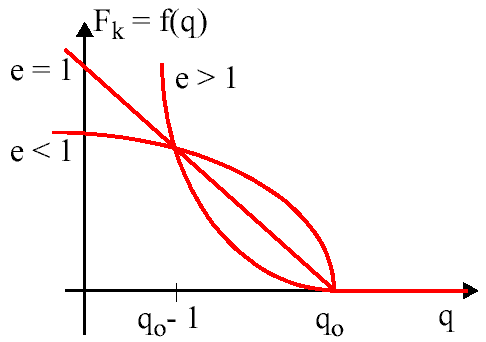
линейное возрастание силы, прямая
пропорциональность.
-
линейное возрастание силы, прямая
пропорциональность.
![]() -
медленное возрастание силы, пологий
график, небольшие амплитуды.
-
медленное возрастание силы, пологий
график, небольшие амплитуды.
|
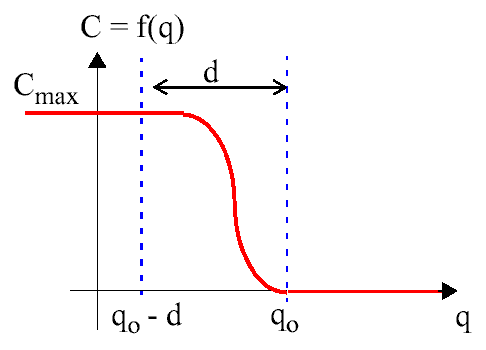
Характер графика второй части уравнения ударной силы на участке Penetration Depth |
Характер графика первой части уравнения ударной силы в зависимости от значения Force Exponent |
![]() -
Damping – коэффициент
демпфирования.
-
Damping – коэффициент
демпфирования.
![]() -
Penetration Depth
– расстояние, на котором изменяется
величина демпфирования.
-
Penetration Depth
– расстояние, на котором изменяется
величина демпфирования.
Необходимость использовать кусочную функцию STEP связана с разным демпфированием при положительной и отрицательной скорости внедрения тел.
Friction Force – сила трения. О силах трения подробнее рассказано выше. Coulomb – это кулоновская сила, т. е. обычная сила сухого трения.
![]() Applied
Force: General Force Vector (Six-Component Torque)
Applied
Force: General Force Vector (Six-Component Torque)
Задает все шесть компонентов сил: три силы и три момента.