

Вопросы и задания
1. Приведите выражения, описывающие работу блоков преобразователей координат ПК1 и ПК2.
2. Обоснуйте структурную схему блока компенсации и способ ее включения в общую схему векторного АЭП.
3. Приведите структурную схему АД в осях х-у с учетом включения в нее блока компенсации.
4. Приведите функциональную схему подсистемы ввода сигналов векторного АЭП.
31. Векторное управление ад с использованием наблюдателя потокосцепления ротора
И змерение
потокосцеплений ΨμА
и ΨμВ
в зазорах под фазными обмотками АД с
помощью датчиков Холла практически
сложно реализовать. Установка датчиков
Холла требует разборки АД, изменения
его конструкции и электрических
характеристик, так как для размещения
датчиков в стали магнитопровода статора
необходимо сделать углубления, а для
прокладки сигнальных проводников
сделать в магнитопроводе канавки.
Поэтому целесообразно применение
наблюдателей, которые позволяют по
легкодоступным в измерении сигналам
фазных напряжений и токов статора
восстановить значения составляющих
потокосцепления Ψ2
ротора в осях α-β
(рис.31.1).
змерение
потокосцеплений ΨμА
и ΨμВ
в зазорах под фазными обмотками АД с
помощью датчиков Холла практически
сложно реализовать. Установка датчиков
Холла требует разборки АД, изменения
его конструкции и электрических
характеристик, так как для размещения
датчиков в стали магнитопровода статора
необходимо сделать углубления, а для
прокладки сигнальных проводников
сделать в магнитопроводе канавки.
Поэтому целесообразно применение
наблюдателей, которые позволяют по
легкодоступным в измерении сигналам
фазных напряжений и токов статора
восстановить значения составляющих
потокосцепления Ψ2
ротора в осях α-β
(рис.31.1).
Для решения задачи восстановления потокосцеплений по осям АД оказывается достаточным в качестве входных сигналов использовать сигналы токов iA и iB и напряжений uА и uB двух фаз А и В АД. Из этих сигналов с использованием преобразователей фаз по выражениям (28.3) формируются составляющие токов и напряжений в осях α-β:
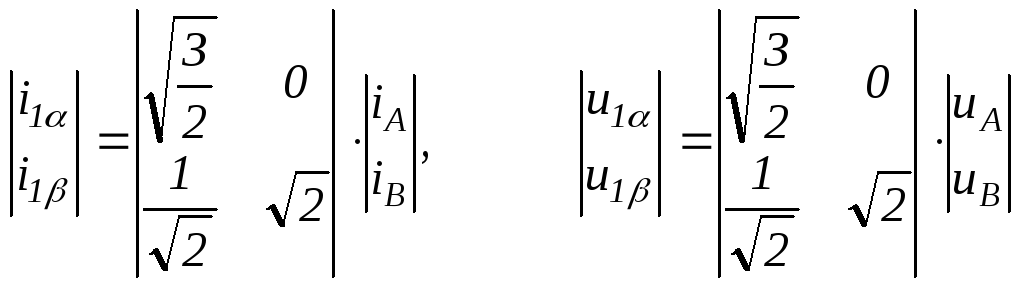 (31.1)
(31.1)
Далее произведем вывод формулы для определения составляющей Ψ2α по оси α потокосцепления Ψ2 ротора. Предварительно выполнив замену индексов (α-β) ← (u-v), из системы (23.6) при ωК=0 берем уравнение цепи статора по оси α, а из (22.1) берем выражения поткосцеплений Ψ1α и Ψ2α по той же оси:
 (31.2)
(31.2)
Система (31.1) из трех уравнений содержит три переменные-функции: Ψ1α, и Ψ2α и i2α. Решаем систему методом подстановки относительно Ψ2α:

откуда
![]() (31.3)
(31.3)
Аналогично выглядит формула для потокосцепления Ψ2β:
![]() (31.4)
(31.4)
Вопросы и задания
1. Обоснуйте необходимость введения в схему векторного АЭП наблюдателя потокосцепления ротора АД.
2. Какие входные сигналы и как они обрабатываются в наблюдателе поткосцепления ротора АД ?
3. Приведите вывод выражения, описывающего работу наблюдателя составляющей по оси α вектора потокосцепления ротора АД.
4. Приведите вывод выражения, описывающего работу наблюдателя составляющей по оси β вектора потокосцепления ротора АД.
5. Приведите функциональную схему подсистемы ввода с наблюдателями сигналов векторного АЭП.
32. Векторное управление ад с использованием наблюдателя частоты вращения
Измерение частоты вращения АД с помощью тахогенератора практически сложно реализовать. Установка тахогенератора требует разборки АД с тем, чтобы подсоединить к его валу тагогенератор. Также требуется прокладка в помещении защитных труб для сигнальных проводов, идущих от тахогенератора до схемы САУ АД.
Для решения задачи восстановления частоты вращения АД оказывается достаточным в качестве входных сигналов использовать сигналы токов iA и iB и напряжений uА и uB двух фаз А и В АД (рис.31.1).
Сначала из этих сигналов токов и напряжений формируются сигналы i1α, i1β, u1α и u1β согласно (31.1). Затем из последних формируется сигнал ωЭЛ.
Для вывода формул восстановления сигнала ωЭЛ из сигналов i1α, i1β, u1α и u1β используем два последних уравнения системы (23.6), произведя перед этим подстановку в ней ωК=0, замену индексов (α-β) ← (u-v) и приняв напряжения равными нулю (ротор АД короткозамкнутый), а также из системы (22.1) возьмем выражения-определения потокосцеплений ротора в осях α-β:
 (32.1)
(32.1)
Входными сигналами (сигналами-аргументами) в системе (32.1) являются Ψ2α, Ψ2β (поступают с наблюдателя потокосцепления ротора) и токи i1α и i1β статора. Переменных-функций три: ωЭЛ, i2α и i2β. Это переопределенная система, так как число уравнений больше числа переменных-функций. Это факт позволяет либо отказаться от участия в вычислениях ωЭЛ одного из уравнений системы, либо использовать все уравнения системы и найти несколькими способами значение ωЭЛ. Выберем второй путь решения системы, так как возникнет проблема, которую можно будет устранить за счет множественности формул расчета ωЭЛ.
Из двух последних выражений системы (32.1) определяем токи i2α и i2:
![]()
подставляем их в первые два уравнения системы (32.1) и находим
 (32.2)
(32.2)
Покосцепления Ψ2α и Ψ2β являются гармонически изменяющимися сигналами, которые периодически обращаются в ноль. Поэтому деление первого уравнения системы (32.2) на Ψ2β с целью определения ωЭЛ и второго – на Ψ2α недопустимо. Чтобы из (32.2) все-таки найти ωЭЛ умножим первое уравнение на -Ψ2β, второе – на Ψ2α и сложим оба уравнения:
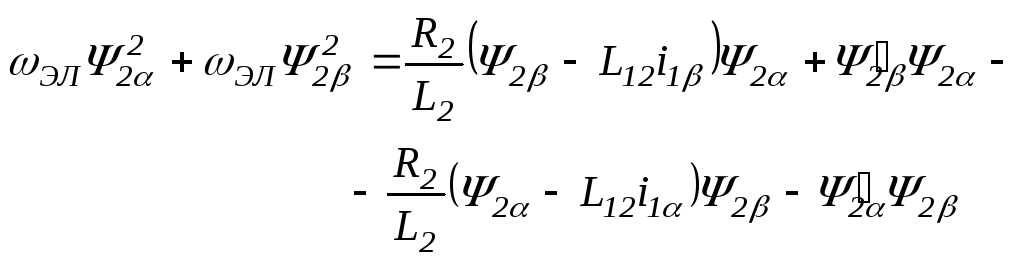 (32.3)
(32.3)
Учитывая равенство
![]() ,
получим окончательную формулу для
наблюдателя частоты вращения
,
получим окончательную формулу для
наблюдателя частоты вращения
![]() (32.4)
(32.4)
Производные
![]() и
и
![]() ,
входящие в выражение (32.4), нужно
соответствующими преобразованиями
исключить, так как значения производных
сильно зависят от уровня искажений
первообразных сигналов Ψ2α
и Ψ2β
и уровня содержащихся в них помех.
,
входящие в выражение (32.4), нужно
соответствующими преобразованиями
исключить, так как значения производных
сильно зависят от уровня искажений
первообразных сигналов Ψ2α
и Ψ2β
и уровня содержащихся в них помех.
Преобразуем выражения, определенные в (29.4):
 (32.5)
(32.5)
После подстановки
![]() и
и
![]() из (32.5) в (32.4) получим
из (32.5) в (32.4) получим
![]() ,
(32.6)
,
(32.6)
Частоту ω1 питающего напряжения АД, которую можно определить известными методами электрических измерений по мгновенным значениям фазных напряжений.
Частота вращения вала АД определится через ωЭЛ по формуле
![]() (32.7)
(32.7)