

больше жесткости
естественной характеристики в
![]() раз. За счет увеличения значения
коэффициента передачи kП
П-регулятора можно лишь повысить
жесткость механических характеристик
и, соответственно, лишь уменьшить ошибку
регулирования частоты вращения, не
обращая ошибку в ноль.
раз. За счет увеличения значения
коэффициента передачи kП
П-регулятора можно лишь повысить
жесткость механических характеристик
и, соответственно, лишь уменьшить ошибку
регулирования частоты вращения, не
обращая ошибку в ноль.
Динамические характеристики не соответствуют ни одной настройке модального управления.
Вопросы и задания
1. Приведите функциональную схему САР частоты вращения в системе УП-Д с П-регулятором.
2. По функциональной схеме составьте математическое описание АЭП с САР частоты вращения.
3. Приведите структурную схему САР частоты вращения в системе УП-Д с П-регулятором.
4. Почему в САР частоты вращения в системе УП-Д с П-регулятором невозможно получение характеристик, соответствующих модальному управлению ?
5. Как, используя полное математическое описание АЭП частоты вращения, рассчитать статические характеристики электропривода ?
6. Как можно увеличить жесткость механических характеристик АЭП частоты вращения с П-регулятором ?
9. Автоматическое регулирование частоты вращения в системе уп-д, настроенной на технический оптимум
Функциональная и структурная схемы приведены, соответственно, на рис.9.1. и рис.9.2. В схему введен регулятор скорости РС. Выбором передаточной функции РС можно обеспечить работу АЭП с показателями качества, отвечающими техническому оптимуму. Для синтеза РС необходимо структурную схему АЭП привести к стандартному виду, три особенности структуры уже описаны в начале темы 7.
Сначала нужно
оставить только один входной сигнал.
Процедура избавлен ия
от второго сигнала аналогична описанной
в вопросе 7. Сначала заменяем все сигналы
в схеме рис.9.2 на отклонения. Тогда на
схеме рис.9.2 перед всеми обозначениями
сигналов нужно добавить значок Δ,
не изменяя самой схемы. Затем принимаем
постоянным момент сопротивления
нагрузки, что эквивалентно тому, что
IC=const
или ΔIC=0.
В результате входной сигнал ΔIC
схемы можно не учитывать, так как его
значение постоянно нулевое, и удалить
из структурной схемы ЭП элемент вычитания
токов iЯ
и IC.
ия
от второго сигнала аналогична описанной
в вопросе 7. Сначала заменяем все сигналы
в схеме рис.9.2 на отклонения. Тогда на
схеме рис.9.2 перед всеми обозначениями
сигналов нужно добавить значок Δ,
не изменяя самой схемы. Затем принимаем
постоянным момент сопротивления
нагрузки, что эквивалентно тому, что
IC=const
или ΔIC=0.
В результате входной сигнал ΔIC
схемы можно не учитывать, так как его
значение постоянно нулевое, и удалить
из структурной схемы ЭП элемент вычитания
токов iЯ
и IC.
Д алее
оставшиеся три блока структурной схемы
ДПТ, сворачиваем в один блок с передаточной
функцией Wy(p)
(4.5).
алее
оставшиеся три блока структурной схемы
ДПТ, сворачиваем в один блок с передаточной
функцией Wy(p)
(4.5).
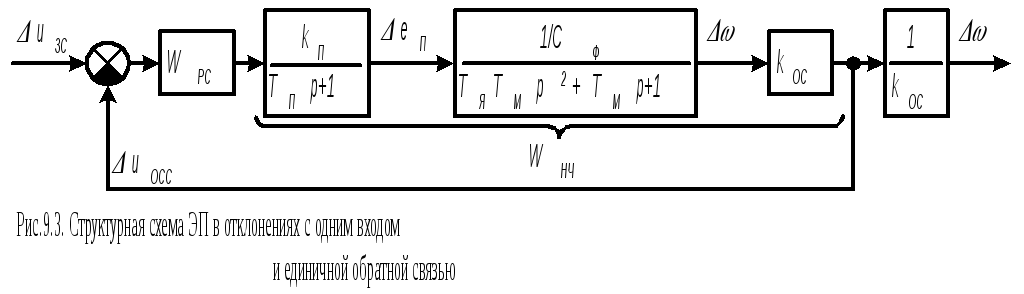
Структурная схема АЭП стандартного вида приведена на рис.9.3.
Задаемся желаемой
передаточной функцией вида
![]() ,
в которой малая постоянная времени Тμ
принята равной ТП.
Для синтеза РС
используем выражение (2.6):
,
в которой малая постоянная времени Тμ
принята равной ТП.
Для синтеза РС
используем выражение (2.6):
 (9.1)
(9.1)
Это ПИД-регулятор частоты вращения, и в нем содержится Д-часть, которая чувствительна к помехам.

Динамические показатели качества соответствуют (2.2). Ошибка регулирования нулевая. Из этого свойства ошибки регулирования следует абсолютно жесткая механическая характеристика: частота вращения не зависит от момента сопротивления нагрузки.
Регулятор скорости реализован на ОУ2, элемент сравнения – на ОУ1 (рис.9.4).
Схема на ОУ2 имеет передаточную функцию
 (9.2)
(9.2)
Вопросы и задания
1. Приведите функциональную схему САР частоты вращения в АЭП с настройкой на технический оптимум.
2. Приведите структурную схему САР частоты вращения в АЭП с настройкой на технический оптимум.
3. Какие особенности должна иметь стандартная структурная схема САР частоты вращения в АЭП с настройкой на технический оптимум.
4. Каким образом преобразуется структурная схема АЭП с САР частоты вращения к виду, содержащему единственный входной сигнал ?
5. Каким образом преобразуется структурная схема АЭП с САР частоты вращения к виду, содержащему единичную обратную связь ?
6. Как рассчитывается передаточная функция регулятора в САР частоты вращения в АЭП с настройкой на технический оптимум ?
7. Приведите принципиальную электрическую схему САР частоты вращения в АЭП с настройкой на технический оптимум.