

І. ВВОДНЫЕ ВОПРОСЫ ТЕОРИИ
ЭЛЕКТРОПРИВОДА ЗАМКНУТОГО ТИПА
1. Способы регулирования координат
электропривода и показатели качества
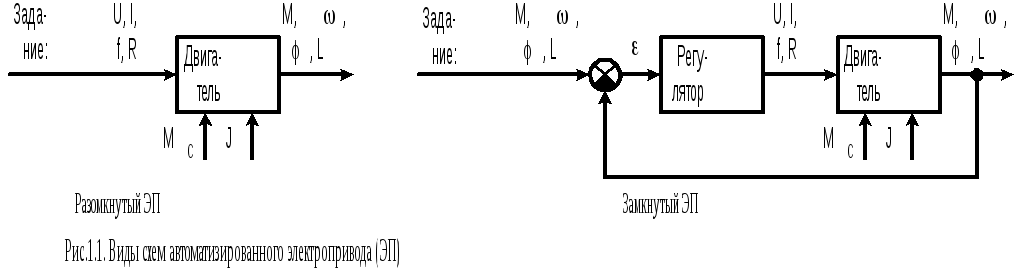
Координатами автоматизированного электропривода являются вращающий момент М, частота вращения ω, угол поворота вала φ электрического двигателя, перемещение L. Схемы управления электроприводами подразделяются на схемы разомкнутого и схемы замкнутого типа (рис.1.1).
Электропривод со схемами управления разомкнутого типа относится к электроприводу с параметрическим управлением, в котором регулирование координат осуществляется заданием параметров входных сигналов, таких как: величины U, I и частота f напряжения и тока, величины сопротивления R цепей обмоток машин и др. При параметрическом управлении в принципе невозможно получить точные значения регулируемых координат в условиях случайно изменяющихся значениях момента сопротивления нагрузки и момента инерции. Регулятора координат в разомкнутом электроприводе нет, а есть только устройства задания управляющих сигналов. Примерами такого электропривода являются электроприводы якорно-швартовных устройств, грузовых кранов и лебедок.
Электропривод со схемами управления замкнутого типа относится к электроприводу, использующему обратные связи по выходным координатам. В состав электропривода входят регуляторы. В электроприводе замкнутого типа возможно регулирование координат с заданными показателями качества при произвольных изменениях момента сопротивления нагрузки и ее момента инерции. Примерами такого электропривода являются электроприводы гребных электрических установок, траловых лебедок.
Показатели качества устанавливаются отдельно для ЭП разомкнутого и замкнутого типа.
Показатели качества для разомкнутого эп
1. Точность регулирования (рис.1.2)
![]() (1.1)
(1.1)
2. Диапазон регулирования
![]() (1.2)
(1.2)
3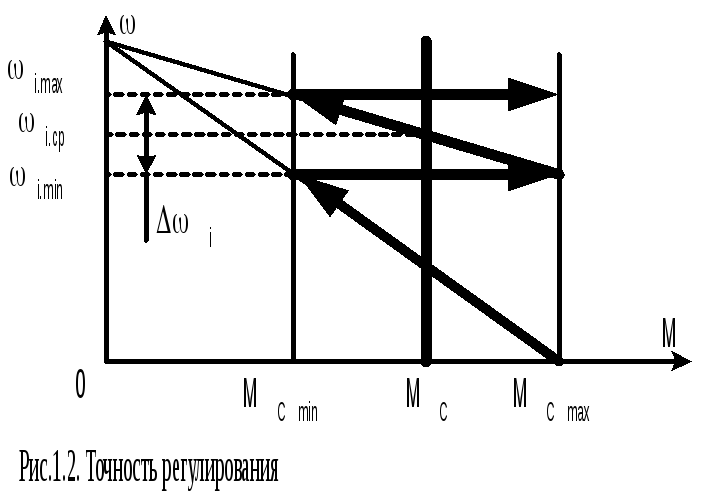 .
Ступенчатость регулирования – равна
количеству регулировочных характеристик
ЭП, обычно равна 3…5.
.
Ступенчатость регулирования – равна
количеству регулировочных характеристик
ЭП, обычно равна 3…5.
Показатели качества для
замкнутого ЭП
а). Простые показатели качества:
1. Статические ошибки регулирования. Определяются для установившегося режима при постоянном сигнале задания
![]() (1.3)
(1.3)
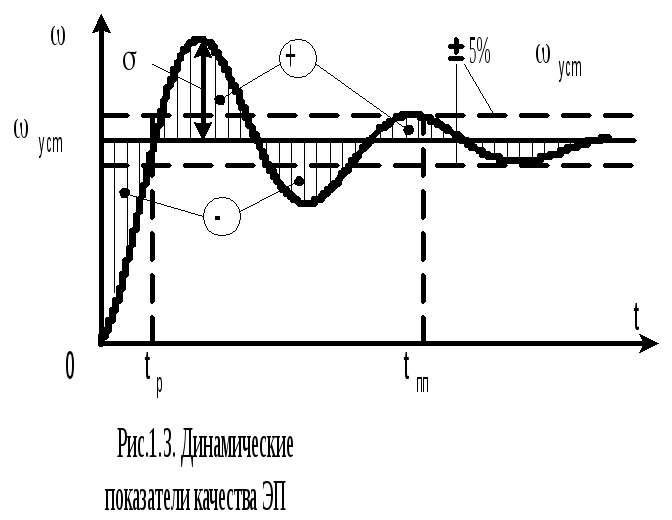
2. Динамическая ошибка или перегулирование σ (заброс). Определяется из графика переходного процесса (рис.1.3).
3. Время регулирования tp (время 1-й установки) и время переходного процесса tпп .
б). Интегральные показатели качества. Используются в основном в оптимальном и адаптивном электроприводах:
1. Время цикла работы ЭП
![]() (1.4)
(1.4)
2. Угол поворота за время Т цикла
![]() (1.5)
(1.5)
3. Энергия, потребляемая (отдаваемая) за цикл
![]() (1.6)
(1.6)
4. Среднеквадратичная ошибка регулирования за цикл
 (1.7)
(1.7)
Вопросы и задания
1. В чем принципиальное различие регулируемых электроприводов разомкнутого и замкнутого типов ?
2. Назовите достоинства и недостатки регулируемых электроприводов разомкнутого типа.
3. Назовите достоинства и недостатки регулируемых электроприводов замкнутого типа.
4. Перечислите и охарактеризуйте показатели качества для регулируемого электропривода разомкнутого типа.
5. Перечислите и охарактеризуйте простые показатели качества для регулируемого электропривода замкнутого типа.
6. Перечислите и охарактеризуйте интегральные показатели качества для регулируемого электропривода замкнутого типа.
2. Методы последовательной коррекции и модального управления с настройками на технический и симметричный оптимум
На рис.2.1 приведена обобщенная структурная схема ЭП замкнутого типа, в которой источник питания и двигатель образуют силовую часть (СЧ) ЭП.
Метод последовательной коррекции заключается в том, что регулятор включен последовательно с силовой частью. Достоинствами метода последовательной коррекции являются:
1 .
Регулятор содержит только маломощные
элементы.
.
Регулятор содержит только маломощные
элементы.
2. Синтез передаточной функции регулятора Wрег(р) наиболее прост.
3. Реализация регулятора по определенной таким образом передаточной функции Wрег(р) наиболее проста.
Метод модального управления состоит в том, что передаточная функция разомкнутого контура ЭП Wраз(р) имеет стандартный вид – моду.
В автоматизированном электроприводе (АЭП) применяются две моды, называемые настройками на технический и симметричный оптимумы.
Настройка на технический оптимум
Передаточная функция разомкнутой САУ ЭП имеет вид
![]() , (2.1)
, (2.1)
где Тμ - малая постоянная времени, входящая в передаточную функцию Wсч(р) силовой части.
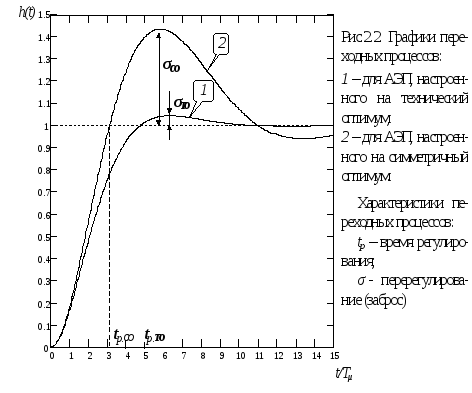
Переходный процесс замкнутой САУ ЭП (рис.2.2, график 1) имеет следующие динамические характеристики:
tp.тo=4,7 Тμ, σто=4,3 % (2.2)
АЭП является астатическим 1-го порядка (сомножитель р в знаменателе передаточной функции Wраз(р) имеет первый порядок), поэтому статическая ошибка регулирования равна нулю.
Переходный процесс описывается формулой
 (2.3)
(2.3)
Произведем расчет передаточной функции регулятора Wрег(р), задаваясь различными передаточными функциями Wсч(р).
Будем использовать передаточную функцию силовой части следующего общего вида
![]() , (2.4)
, (2.4)
в которой постоянная времени T1 меньше всех остальных: T1<{T2, T3,…,Tn}.
Обозначим наименьшую постоянную времени как Тμ=Т1. Остальные постоянные времени назовем большими постоянными времени.
1). Пусть в Wсч(р) имеется только одна большая постоянная времени Т2. Передаточная функция силовой части примет вид
![]() (2.5)
(2.5)
Так как регулятор и силовая часть включены последовательно, то
![]() и
и
![]() (2.6)
(2.6)
Вычисляем
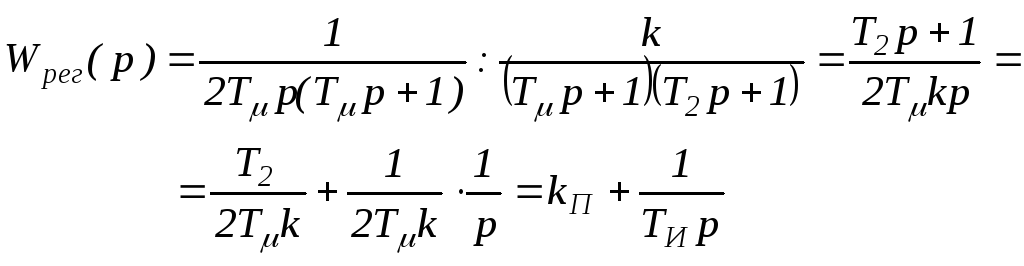 (2.7)
(2.7)
Синтезирован ПИ-регулятор с коэффициентом передачи kП пропорциональной части и постоянной времени ТИ интегральной части. Этот регулятор реализуется на основе операционного усилителя.
1). Пусть в Wсч(р) имеется две больших постоянных времени Т2 и Т3. Передаточная функция силовой части примет вид
![]() (2.8)
(2.8)
Вычисляем
 (2.9)
(2.9)
Синтезирован ПИД-регулятор с коэффициентом передачи kП пропорциональной части, постоянной времени ТИ интегральной части и постоянной времени ТД дифференциальной части. Этот регулятор реализуется на основе операционного усилителя. Из-за Д-части регулятор чувствителен к помехам.