

71.Кодування інформації в цифрових мережах
Найпоширеніші наступні коди:
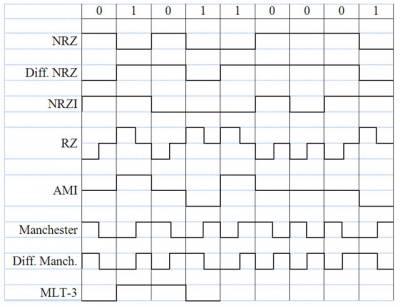
1. NRZ (Non-Return to Zero – без повернення до нуля) – потенційний код, стан якого прямо або інверсно відображає значення біта даних;
2. диференціальний NRZ – стан міняється на початку бітового інтервалу для "1” і не міняється при "0”;
3. NRZI (Non-Return to Zero Inverted – без повернення до нуля з інверсією) – стан міняється на початку бітового інтервалу при передачі "0” і не міняється при передачі "1”. Використовується в FDDI, 100BaseFX;
4. RZ (Return to Zero – з поверненням до нуля) – біполярний імпульсний код, що самосинхронізується, що представляє "1” і "0” імпульсами протилежної полярності, що тривають половину такту (в другу половину такту стан встановлюється в нуль); усього використовується три стани;
5. AMI (Bipolar Alternate Mark Inversion – біполярне кодування з альтернативною інверсією) – використовується три стани: 0, + і –, для кодування логічного нуля використовується стан 0, а логічна одиниця кодується по черзі станами + і –. Використовується в ISDN, DSx;
6. Манчестерске кодування (manchester encoding) – двофазне полярне кодування, що самосинхронізується, логічна одиниця кодується перепадом потенціалу в середині такту від низького рівня до високого, логічний нуль - зворотним перепадом (якщо необхідно представити два однакових значення підряд, на початку такту відбувається додатковий службовий перепад потенціалу). Використовується в Ethernet;
7. Диференціальне манчестерске кодування (differential manchester encoding) – двофазне полярне кодування, що самосинхронізується, логічний нуль кодується наявністю перепаду потенціалу на початку такту, а логічна одиниця - відсутністю перепаду; у середині такту перепад є завжди (для синхронізації). В Token Ring застосовується модифікація цього методу, крім "0” і "1”, що використовує службові біти "J” і "K”, що не мають перепаду в середині такту ("J” не має перепаду на початку такту, "K” – має);
8. MLT-3 – трьохрівневе кодування зі скремблюванням без самосинхронізації, логічний нуль кодується збереженням стану, а логічна одиниця кодується по черзі наступними станами: +V, 0, -V, 0, +V і т.д. Використовується в FDDI і 100BaseTX;
9. PAM5 (Pulse Amplitude Modulation) – п'ятирівневе біполярне кодування, при якому кожна пара біт даних представляється одним з п'яти рівнів потенціалу. Застосовується в 1000BaseT;
10. 2B1Q (2 Binary 1 Quarternary) – пари біт даних представляються одним четвертинним символом, тобто одним із чотирьох рівнів потенціалу. Застосовується в ISDN;
73.Конфігурація контуру регулювання з під-регулятором
Настройка PID-закона по параметрам объекта (CALC)
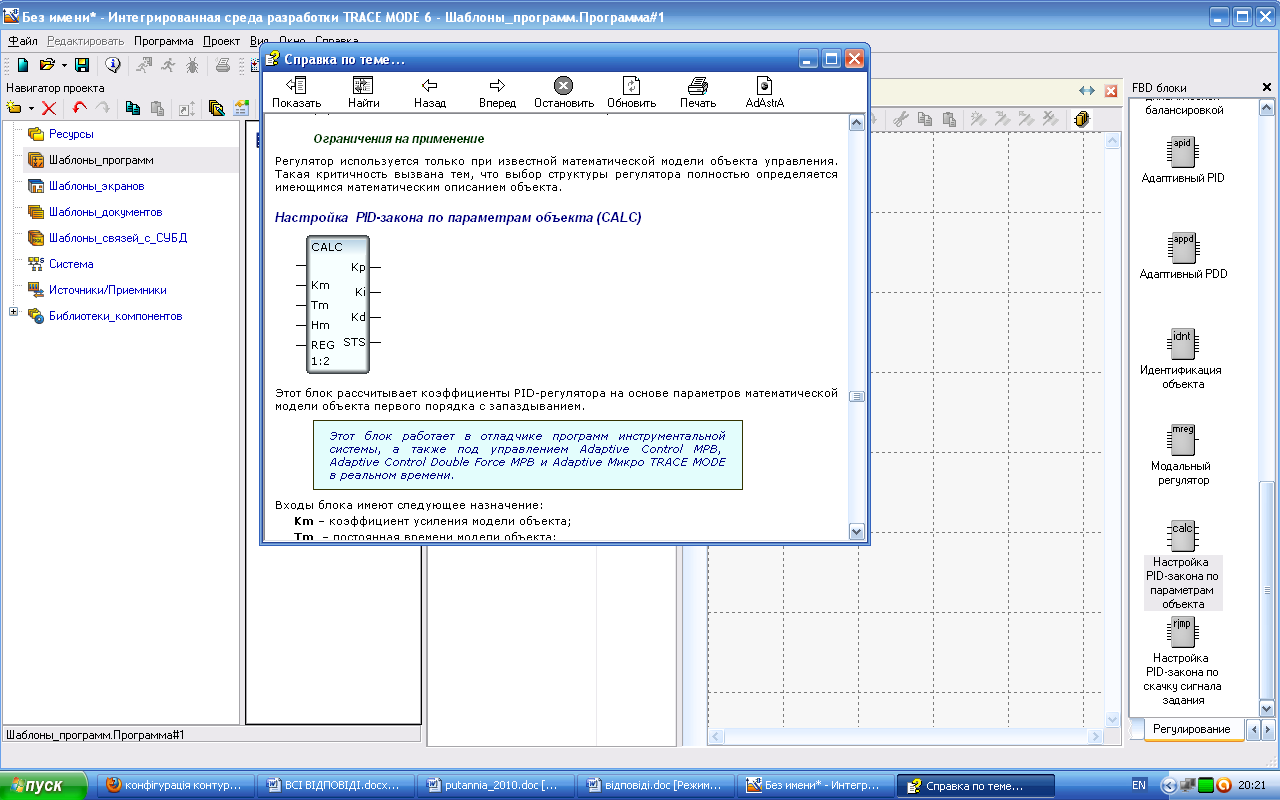
Этот блок рассчитывает коэффициенты PID-регулятора на основе параметров математической модели объекта первого порядка с запаздыванием. Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
Km – коэффициент усиления модели объекта;
Tm – постоянная времени модели объекта;
Hm – время запаздывания модели объекта;
Reg – выбор типа регулятора:
0 – PI-регулятор;
1 – PID-регулятор.
На входные параметры налагаются следующие требования: значения входов должны быть неотрицательны;
коэффициент передачи и постоянная времени объекта управления должны быть больше нуля;
отношение запаздывания к постоянной времени должно лежать в пределах от 0 до 2.
Выходы данного блока используются следующим образом:
Kp – коэффициент при пропорциональной составляющей;
Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей;
STS – флаг ошибки входных параметров:
0 – входные данные удовлетворяют требованиям;
Настройка PID-закона по скачку сигнала задания (RJMP)
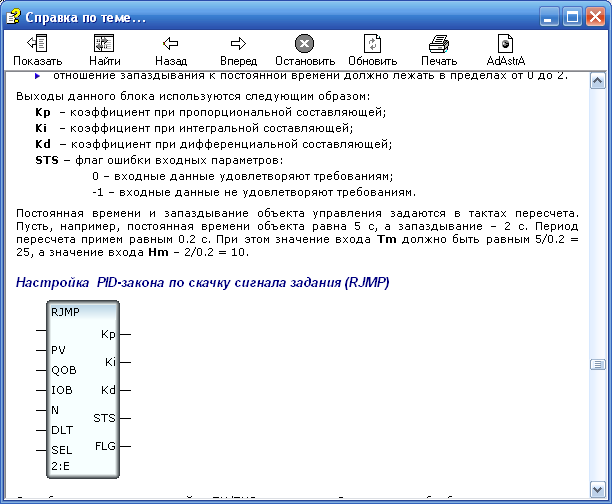
Этот блок вычисляет настройки ПИ/ПИД регулятора. Для этого он обрабатывает два массива данных: массив значений входа объекта и его выхода. Их накопление начинается при смене задания регулятора на величину, превышающую 6% (от этой величины зависит точность вычисления настроек регулятора). Накопление прекращается, когда объект перейдет в установившееся состояние. Это означает, что выход объекта заданное число раз (значение входа N) не отличается от задания на величину, заданную входом DLT.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
PV – задание. При его изменении более чем на 6% и FLG = 100 (установившееся состояние) начинается накопление массивов;
QOB – вход, контролирующий выход объекта управления;
IOB – на этот вход подается вход объекта управления (управляющее воздействие);
N – вход, задающий число тактов пересчета для определения установившегося состояния. По умолчанию (при равенстве входа 0) это число равно 60 (минимальное значение – 40);
DLT – вход, задающий максимальное отклонение выхода объекта от задания для определения установившегося состояния. По умолчанию (при равенстве входа 0) это значение равно 0.8 (максимальное значение – 5, минимальное – 0.1);
SEL – выбор типа закона: 1 - ПИД, 0 - ПИ;
Выходы данного блока используются следующим образом:
Kp – коэффициент при пропорциональной составляющей;
Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей;
STS – флаг результата последней обработки массивов: