

5.2 Построение фчх и определение запасов устойчивости
Фазочастотную характеристику (ФЧХ) исходной разомкнутой системы построим по формуле:
 (58)
(58)
График ФЧХ изображён на рисунке 6.
Запасы устойчивости:
- по фазе – определяется превышением
графика ЛФЧХ над прямой
![]() на частоте пересечения ЛАЧХ нулевого
уровня. В данном случае запас по фазе
бесконечен, т.к. ЛАЧХ не пересекает
горизонтальную ось.
на частоте пересечения ЛАЧХ нулевого
уровня. В данном случае запас по фазе
бесконечен, т.к. ЛАЧХ не пересекает
горизонтальную ось.
- по амплитуде – определяется превышением
графика ЛАЧХ над осью частот на частоте
пересечения ЛФЧХ с осью
![]() .
Запас по амплитуде также бесконечен.
.
Запас по амплитуде также бесконечен.
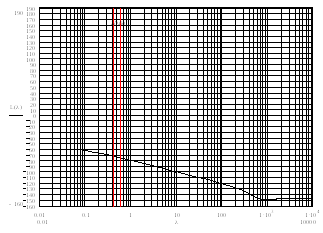
Рисунок 5 – ЛАЧХ системы

Рисунок 6 – ЛФЧХ системы
Т. к. изображённая на рисунке 5 ЛАЧХ системы не пересекает ось абсцисс (т.е. не проходит через точку на оси абсцисс, соответствующую частоте среза и определяемую необходимым временем регулирования) и не имеет наклон минус 20 дБ/дек в интервале, определяемом заданным в техническом задании показателем колебательности (в своей среднечастотной области), то можно сделать вывод, что разрабатываемая система не отвечает заданным динамическим характеристикам. Кроме того, проектируемая система должна удовлетворять показателям качества, указанным в техническом задании. Поэтому система требует корректировки.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
6.1 Построение ЖЛАЧХ
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки:
![]() , (59)
, (59)
![]() . (60)
. (60)
Зададимся скоростью перемещения нагрузки, ускорением и ошибкой соответственно:
Ω= 0.07 м/с;
ε= 0.03 м/с2;
![]() м.
м.
Тогда получим координаты рабочей точки в логарифмическом масштабе:
![]() (рад), (61)
(рад), (61)
![]() (дБ). (62)
(дБ). (62)
Через эту точку проводим низкочастотную асимптоту с наклоном минус 20Бд/дек (рисунок 7).
По номограмме Солодовникова (Рисунок 5) и заданным в первом этапе перерегулированию, колебательности и времени регулирования определяем частоту среза:
![]() (рад). (63)
(рад). (63)
Для того чтобы система была устойчива
и отвечала заданным критериям качества
необходимо, чтобы через точку на оси
абсцисс с координатой
![]() она проходила с наклоном минус 20 дБ/дек
до пересечения с асимптотами
она проходила с наклоном минус 20 дБ/дек
до пересечения с асимптотами
![]() дБ и
дБ и
![]() дБ.
дБ.
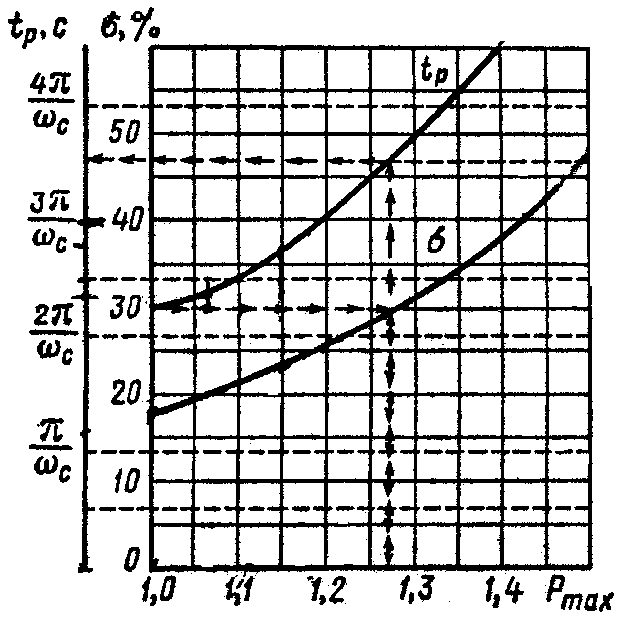
Рисунок 5 - Номограмма Солодовникова
В данном случае частота![]() попала в запретную зону. Значит,
попала в запретную зону. Значит,
![]() необходимо сдвинуть вправо до пересечения
асимптоты рабочей зоны с осью частот,
при этом асимптоту желаемой ЛАЧХ (ЖЛАЧХ)
в низкочастотной области проведём по
асимптоте рабочей зоны.
необходимо сдвинуть вправо до пересечения
асимптоты рабочей зоны с осью частот,
при этом асимптоту желаемой ЛАЧХ (ЖЛАЧХ)
в низкочастотной области проведём по
асимптоте рабочей зоны.
За пределами полосы, ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с низкочастотной частью построенной ЛАЧХ.
И![]() з
построений можно определить передаточную
функцию ЖЛАЧХ (рисунок 6):
з
построений можно определить передаточную
функцию ЖЛАЧХ (рисунок 6):
(64)
6.2 Построение ЖФЧХ и определение запасов устойчивости
ФЧХ скорректированной системы построим по формуле:
 . (65)
. (65)
График ЖФЧХ изображён на рисунке 8.
Запасы устойчивости:
- по фазе – определяется превышением
графика ЛФЧХ над прямой
![]() на частоте пересечения ЖЛАЧХ нулевого
уровня.
на частоте пересечения ЖЛАЧХ нулевого
уровня.
![]() .
.
- по амплитуде – определяется превышением
графика ЛАЧХ над осью частот на частоте
пересечения ЖЛФЧХ с осью
![]() .
В данном случае запас по амплитуде
бесконечен.
.
В данном случае запас по амплитуде
бесконечен.
Полученные значение запаса устойчивости по фазе и амплитуде достаточны, т.к. запас устойчивости по фазе больше минимально необходимых 30…400, а запас по амплитуде максимально возможен.
6.3 Построение ЛАЧХ корректирующего устройства
Для повышения точности системы применим корректирующее устройство (КУ), включаемое параллельно усилителю в исходной системе (применяемый усилитель - электромашинный с высоким коэффициентом усиления - обладает нежелательными характеристиками, кроме того, остальные устройства системы скорректировать менее вероятно).
Для получения передаточной функции параллельного КУ найдём передаточную функцию последовательного КУ. ЛАЧХ последовательного корректирующего звена определяется путем вычитания из ЖЛАЧХ ЛАЧХ неизменяемой части:
![]() .
(66)
.
(66)
П![]() о
виду полученной ЛАЧХ (рисунок 7)
последовательного корректирующего
устройства находим его передаточную
функцию:
о
виду полученной ЛАЧХ (рисунок 7)
последовательного корректирующего
устройства находим его передаточную
функцию:
(67)
П![]() ереходя
от псевдочастоты к реальной частоте,
используя замену
ереходя
от псевдочастоты к реальной частоте,
используя замену
![]() ,
и далее переходя к переменной p,
получим:
,
и далее переходя к переменной p,
получим:
(68)
Далее применим формулу перехода от последовательного КУ к параллельному КУ. Передаточная функция параллельного корректирующего звена усилителя через передаточную функцию последовательного КУ:
![]() . (69)
. (69)
Т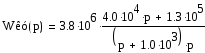 огда
передаточная функция параллельного
КУ:
огда
передаточная функция параллельного
КУ:
(70)
и![]() ли
в стандартном виде
ли
в стандартном виде
(71)
Снова переходя от p к псевдочастоте, получим:
![]() . (72)
. (72)
ЛАЧХ параллельного КУ построим по формуле:
![]() . (73)
. (73)
ЛАЧХ параллельного КУ изображена на рисунке 7.

Рисунок 7 – ЛАЧХ, ЖЛАЧХ системы, ЛАЧХ корректирующего устройства

Рисунок 8 – ЛФЧХ, ЖЛФЧХ системы
7 СИНТЕЗ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
7.1 Синтез параллельного корректирующего звена
Коррекция динамических свойств САУ осуществляется для выполнения требований по точности, устойчивости и качества переходных процессов.
С точки зрения требований к точности САУ коррекция может потребоваться для увеличения порядка астатизма или коэффициента передачи системы при сохранении устойчивости и определенного качества переходного процесса.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходного процесса.
Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им (также, конечно, существуют и комбинированные способы включения). Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные и параллельные. В данном случае выбрано параллельное корректирующее устройство.
Представим передаточную функцию (71) КУ в виде
![]() , (74)
, (74)
т.е.
![]() . (75)
. (75)
По найденной передаточной функции (74)
подберём два корректирующих звена с
передаточными функциями
![]() и
и
![]() соответственно и соединим их последовательно
(рисунок 9) [13].
соответственно и соединим их последовательно
(рисунок 9) [13].
Оба звена, а значит, и КУ в целом, являются активными преобразовательными элементами, обладают высокой нагрузочной способностью и стабильными характеристиками и тем точнее реализуют приведённые передаточные функции, чем выше собственный коэффициент передачи операционных усилителей (ОУ). В качестве ОУ может быть использован прецизионный усилитель 140УД17А.
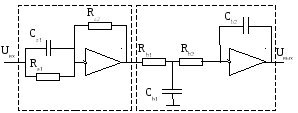
Рисунок 9 - Параллельное корректирующее устройство усилителя
Рассчитаем параметры корректирующего устройства.
Задаемся значениями Сa1=250
мкФ, Сb1=30 мкФ.
По виду передаточной функции (74) определим:
![]() ,
T =0.3 c, T1
= 10-5 c, T2
= 10-3 c. Тогда:
,
T =0.3 c, T1
= 10-5 c, T2
= 10-3 c. Тогда:
![]() (кОм), (76)
(кОм), (76)
![]() (МОм), (77)
(МОм), (77)
![]() (кОм), (78)
(кОм), (78)
![]() (нФ). (79)
(нФ). (79)
На рисунке 10 изображена функциональная схема разрабатываемой системы с корректирующим устройством.
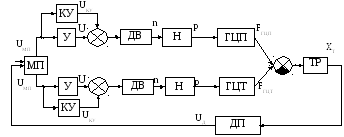
Рисунок 10 - Функциональная схема системы с КУ