

Лист
Изм.
Лист N
документа
Подпись
Дата
Введение
Системы автоматического управления создаются для того, чтобы автоматически, без непосредственного участия человека поддерживать необходимый режим работы различных обслуживаемых этими автоматами объектов. Системы автоматического управления самостоятельно, без вмешательства извне либо поддерживают постоянной, либо изменяют по заранее заданному закону одну или несколько физических величин, характеризующих процессы, происходящие в обслуживаемых объектах, или же сами определяют в зависимости от ряда условий нужный или оптимальный закон управления объектом.
Управляемый процесс может определяться рядом параметров и их соотношениями. В простых случаях управляемый процесс может достаточно полно определяться одним параметром (координатой). Системы для управления такими процессами носят название локальных систем автоматики – это системы автоматики, предназначенные для решения одной функциональной задачи, для управления одним устройством или для управления или сигнализации одного параметра.
Процесс регулирования может быть осуществлен одним из двух основных способов регулирования или их комбинацией.
Первый способ – это компенсация всех возмущений, действующих на систему (регулирование по возмущению). Но поскольку в реальных системах количество таких факторов очень велико и постоянно изменяется, то это не рационально.
Второй способ – регулирование по отклонению выходной величины от заданного значения, лишен этого недостатка и получил широкое распространение.
Системы автоматического управления позволяют повысить эффективность ведения технологических процессов, сократить частично или полностью количество обслуживающего персонала на том или ином объекте, повысить производительность автоматизированных устройств и объектов и повысить их экономичность, получить возможность вести требуемый процесс в условиях и местах, недоступных для человека.
Экскаватор шагающий - полноповоротная электрическая землеройная машина на шагающем ходу с рабочим оборудованием драглайна. Шагающие экскаваторы предназначаются для разработки и перевалки грунтов на вскрышных работах угольных и горнорудных карьеров, а также для производства земляных работ на строительстве крупных гидротехнических сооружений. Работая на слабых, а иногда и на заболоченных грунтах, эти экскаваторы должны иметь возможно меньшее удельное давление на грунт. Для крупных и мощных драглайнов наилучшим решением этого вопроса является шагающее ходовое оборудование. Основу механизма шагания экскаватора составляют две лыжи, связанные с поворотной платформой, и круглая нижняя рама (база), опирающаяся на грунт при работе экскаватора. База является основной опорной поверхностью шагающего экскаватора, в то время как две лыжи являются вспомогательным средством, предназначенным только для передвижения экскаватора. Во время работы экскаватора лыжи подняты над грунтом.
Целью курсового проектирования является разработка локальной системы управления (ЛСАУ) - САУ ходом шагающего экскаватора, которая в зависимости от результата сравнения заданного и пройденного экскаватором пути будет управлять его перемещением.
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Технические требования ЛСАУ
Технические характеристики шагающего экскаватора:
Тип ЭШ-14/75
Ходовое оборудование базы экскаватора шагающее
Диаметр опорной базы, м 14
Длина лыжи, м 16
Ширина лыжи, м 2,5
Длина шага, м до 2
Мощность двигателя, кВт 7,5
Скорость передвижения, м/с 0,07
Средняя продолжительность рабочего цикла, c 65
Рабочий вес экскаватора, т 1400
Среднее удельное давление на грунт, МПа:
при работе 0,098
при передвижении 0,147
Техническая производительность, м3/ч 750-850
Условия эксплуатации системы:
Температура воздуха - от -40 до 50°С
Район с умеренным климатом
1.2 Показатели качества ЛСАУ
Колебательность системы 1.3
Перерегулирование, % 35-60
Время регулирования, с 20
Время дискретности, с 65
Ошибка , м 0,05
1.3 Состав ЛСАУ
Целью проектируемой системы является управление передвижением на заданное расстояние ходового оборудования экскаватора.
Изобразим функциональную схему ЛСАУ (рисунок 1):
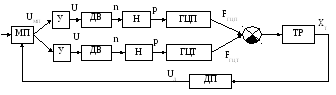
Рисунок 1 - Функциональная схема системы
МП - микропроцессор со встроенными АЦП и ЦАП, выполняющий функции задатчика и сравнивающего устройства;
У - усилитель;
ДВ - двигатель;
Н – насос постоянной производительности;
ГЦП - главный (подъёмный) цилиндр;
ГЦТ - вспомогательный (тяговый) цилиндр;
ТР – траверса (горизонтальная балка);
ДП – датчик перемещений.
Шагающее ходовое оборудование состоит из круглой опорной базы в виде круга большого диаметра, двух лыж и механизма шагания. При передвижении экскаватор попеременно опирается на базу и лыжи. При работе (экскавации) экскаватор опирается на базу и лыжи подняты в крайнее верхнее положение.
Ходовое оборудование шагающих экскаваторов состоит из двух одинаковых синхронно работающих механизмов шагания, расположенных симметрично относительно продольной оси экскаватора. Механизм шагания состоит из лыж, подъемного цилиндра и тягового цилиндра. Штоки поршней цилиндров шарнирно соединены на траверсе между собой и с лыжами [10].
В качестве привода ходового оборудования экскаватора был выбран гидравлический привод, который имеет такие достоинства, как возможность бесступенчатого регулирования скоростей рабочих органов в широких пределах (от нулевых до максимальных значений), плавность в работе, компактность конструкции, самосмазываемость деталей гидравлических систем, что значительно снижает износ этих деталей.
Управление ходом экскаватора производится следующим образом: посредством микропроцессора устанавливается требуемое значение регулируемой величины – перемещения. Сведения о действительном значении перемещения получают от специального измерительного органа – датчика перемещений. Информация о заданном и фактическом значении перемещения преобразуется в пропорциональное значение напряжения электрического тока. Эти два значения напряжения - соответствующее заданному и фактическому значениям - сравниваются между собой в микропроцессоре. Микропроцессор посылает команду элементу управления (двигателю), а тот, в свою очередь включает исполнительный механизм (насос), который закачивает рабочую жидкость в нижние полости подъёмного и вспомогательного цилиндров. В результате движения поршней главных (подъёмных) цилиндров происходит поднятие связанной с ними траверсы (и соответственно лыж) и опускание экскаватора на базу, а в результате движения поршней вспомогательных (тяговых) цилиндров – выдвижение лыж в направлении движения экскаватора.
После передвижения лыжи возвращаются в исходное положение, после чего можно начать или следующий цикл шагания, или выключить механизм шагания и начать экскавацию.
Насос работает до тех пор, пока рассогласование не будет ликвидировано, то есть пока измеряемое перемещение не достигнет заданного значения.
2 ПОДБОР ЭЛЕМЕНТОВ И РАСЧЕТ ИХ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
2.1 Выбор микропроцессора
Среди устройств автоматики наиболее широкое распространение получили микропроцессорные комплекты (МПК) серий К580, К583, К588. При выборе МПК следует руководствоваться следующими соображениями:
-
высокая производительность МП, достаточный объем ОЗУ и ПЗУ;
-
возможность цифровой обработки аналоговых сигналов в реальном масштабе времени;
-
возможность программной коррекции;
-
малое энергопотребление;
-
совместимость с другими микросхемами;
-
доступность элементов;
-
мощная и гибкая система команд МП;
-
наличие встроенных ЦАП и АЦП.
На основании этих критериев выбираем МП серии К583ВГ2. Это однокристальный МП цифровой обработки аналоговых сигналов в реальном масштабе времени, со встроенными аналоговыми системами ввода-вывода (ЦАП и АЦП), с 8-ю разрядным ПЗУ, ОЗУ (емкостью 40х25 слов), ALU, двумя входными и четырьмя выходными аналоговыми каналами.
Этот МП выполнен по высококачественной n-МОП–технологии, совместим с БИС серии К580. В нем реализована мощная и гибкая система команд с расширенными возможностями адресации памяти.
Выбранный микропроцессор обладает необходимой производительностью, мощной и гибкой системой команд и управления обработкой информации, возможностью программной коррекции ЛСУ, совместим с БИС, и имеет возможность обрабатывать аналоговый сигнал в режиме реального времени благодаря встроенным АЦП и ЦАП [15].
Технические характеристики МП К583ВГ2:
-
25-ти разрядное АLU;
-
16-ти разрядные ОЗУ (192х24 бит) и ПЗУ (40х25 слов);
-
время преобразования не более 50 мкс;
-
нелинейность ЦАП и АЦП <0,1%;
-
тактовая частота 5 МГц;
-
напряжение питания 2 В;
-
потребляемая мощность 1,0 В∙А;
-
входное аналоговое напряжение не более 2 В;
-
выходное сопротивление (хранение) не менее 100 кОм;
-
выходной ток
 0,4-2
мА;
0,4-2
мА; -
входной ток не более 2,0 мА;
-
диапазон рабочих температур от –10 до 70 0С.
Передаточную функцию МП принимаем равной единице:
WМП(p)=1. (1)
2.2 Выбор гидроцилиндров (подъёмного и тягового)
Преобразование энергии потока жидкости в механическую энергию и перемещение выходного звена (вала, штока) происходит в гидродвигателе, являющемся исполнительным органом любой гидравлической системы. В объемном гидродвигателе преобразование энергии и движения осуществляется в процессе наполнения жидкостью рабочих камер и перемещения вытесняемых тел (поршней, плунжеров, пластин и т.п.) при четком разделении приемной (нагнетательной) и отдающей (сливной) полостей. Объемные гидродвигатели подразделяют на гидроцилиндры (силовые и моментные) и гидромоторы. В гидромоторах выходное звено (вал) совершает неограниченное вращательное движение. В силовых гидроцилиндрах вытесняемое тело (поршень, плунжер) совершает возвратно-поступательное движение относительно корпуса, в моментных - возвратно-поворотное движение на угол менее 360°.
Гидродвигатели нашли широкое применение в качестве исполнительного органа при автоматизации отдельных операций технологических процессов, при автоматическом дистанционном управлении машинами, для приводов многих движений станков, перемещения орудий строительных и дорожных машин. Они имеют малый вес и объем на единицу мощности, легко встраиваются в различные механизмы, реверсивны, малоинерционны. Гидродвигатели работают при тех же давлениях, что и насосы [3].
Для данной системы подходит силовой гидроцилиндр. Силовые гидроцилиндры по своим схемам и конструкциям очень разнообразны. В зависимости от выполняемых операций они могут быть одностороннего и двустороннего действия, т.е. совершать работу под действием жидкости при движении поршня или плунжера только в одном или двух направлениях. В первом случае поршень возвращается в исходное положение благодаря собственному весу или под действием пружины.
Гидроцилиндры могут быть с выходом штока или плунжера только в одну сторону - цилиндры с односторонним штоком, или в обе стороны - цилиндры с двусторонним штоком. Гидроцилиндры могут также иметь несколько штоков или плунжеров, расположенных один в другом так, что общий ход их будет больше длины корпуса - это телескопические цилиндры
Выберем в качестве тягового гидроцилиндра поршневой гидроцилиндр одностороннего действия типа 4000М-4630010-Б. Здесь под действием потока рабочей жидкости, поступающей в штоковую полость, происходит втягивание штока.
Технические характеристики гидроцилиндра типа 4000М-4630010-Б:
Номинальный расход, м3/с 1.5
Давление в напорной гидролинии, МПа 10
Диаметр поршня, м 0.3
Масса поршня, кг 3
КПД гидроцилиндра 0.92
Максимальная скорость потока рабочей жидкости, м/с 6
Ход поршня, мм 2200
В качестве подъёмного гидроцилиндра выберем поршневой гидроцилиндр одностороннего действия типа 5700М-5330011-Б [3].
Технические характеристики гидроцилиндра типа 5700М-5330011-Б:
Номинальный расход, м3/с 2.5
Давление в напорной гидролинии, МПа 12
Диаметр поршня, м 0.4
Масса поршня, кг 4
КПД гидроцилиндра 0.85
Максимальная скорость потока рабочей жидкости, м/с 7
Ход поршня, мм 1000
Гидроцилиндр представляет собой инерционное звено с передаточной функцией вида
![]() , (2)
, (2)
где
![]() - коэффициент передачи гидроцилиндра;
- коэффициент передачи гидроцилиндра;
![]() -
постоянная времени гидроцилиндра,
с; (3)
-
постоянная времени гидроцилиндра,
с; (3)
![]() - соотношение скорости и усилия [4].
- соотношение скорости и усилия [4].
При
давлении в напорной гидролинии р=10 МПа
соотношение скорости и усилия
![]() .
При давлении в напорной гидролинии р=12
МПа соотношение скорости и усилия
.
При давлении в напорной гидролинии р=12
МПа соотношение скорости и усилия
![]() .
.
![]() - скорость перемещения поршня, м/с; (4)
- скорость перемещения поршня, м/с; (4)
QГЦ - расход рабочей жидкости, поступающей в гидроцилиндр, м3/с;
![]() -
эффективная площадь поршня со стороны
нагнетания, м2;
-
эффективная площадь поршня со стороны
нагнетания, м2;
dП - диаметр поршня, м;
mП - масса поршня, кг;
![]() - усилие, развиваемое гидроцилиндром,
Н: (5)
- усилие, развиваемое гидроцилиндром,
Н: (5)
р - давление в напорной гидролинии, Па.
![]() (Н); (6)
(Н); (6)
![]() (Н). (7)
(Н). (7)
Передаточная функция с учетом коэффициентов тягового гидроцилиндра 4000М-4630010-Б:
 . (8)
. (8)
Передаточная функция с учетом коэффициентов подъёмного гидроцилиндра 5700М-5330011-Б:
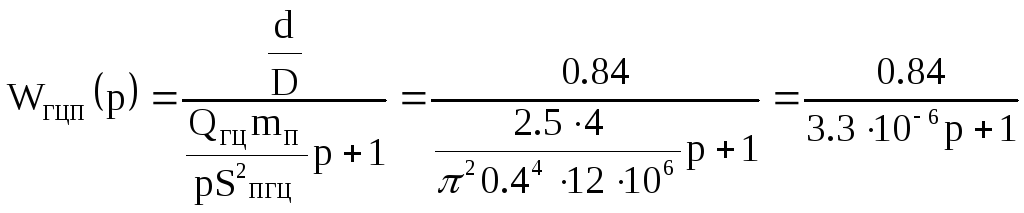 . (9)
. (9)